
DBJX-202 �ھ�CҺ�����̙Cе��Ӗ�_
Һ���ھ�C�ǙCе��������Ҫ�ęCе�����V�������ڹ��̽�����ʩ����·��ˮ�����̡��� �����µ���ʯ��ʩ���Լ��Vɽ�ɾ����I�� Ŀǰ��С���ھ�C��ȫ��������Һ�����ӡ�Һ���� ��C�^֮�Cеʽ�ھ�C�����w�eС�������p�������`��㡢�ھ��������ڌ��F�^�d���o�� �h���x�ٿv�ȃ��c�������������Ӽ��g��Һ�����g�ϵđ��ã�ʹ���̙Cе�������Cе�C�� ���gˮƽԽ��Խ�ߣ�������@Щ�Cе��ʹ�ÿɿ��ԡ�������ȫ�ԡ����m�Ժ�ʹ�É��������m�� �Ը�����
�ھ�CҺ�����̙Cе��Ӗ�_���Ԇζ�Һ���ھ�Cе�錦�������_�l��һ�N��Ӗƽ�_����Ӗ�_ �Y���o���������������������Σ���ȫ�ɿ�������Č���������O�䣬�����a���L���ԁ����� ��қ]�й��̙Cе�O��Ŀհף���ʹ�W�����Բ������Ҿ����˽��ھ�Cе�ĽY����ԭ�������� ���Լ����ֲ�������Ӗ�_���ж�N���Ʒ�ʽ�����քӿ��ơ��^���������߀���пɾ��̿��ƣ� ����ʹ�W���܉���ɻ��A���Ʒ�ʽ����̽�����Ԅӿ��ƞ�Ŀ�ĵ�ȫ�²���ģʽ��

(�����D)
һ������Ŀ
1��Һ�����Ӹ�Ԫ�����Y��������ԭ���^Ħ�����b��
2��Һ���ھ�Cе��ʾ���ƌ�
3��PLC ܛ��������ʾ�����ƌ�
4���ɾ������������PLC�� 늚���ƌ��C-�-Һһ�w���ƌ�
����������
1��Һ���ھ�Cе��ʾ���ƌ��
1���ھ����I���P���Ͷ��U�ͺ��M�й�����
2�����D���I���ӱ�����ͬ�rƽ�_���D��
3��ж�����I�����U���P������ͬ�r��ۿ��{��λ�ø߶ȣ�
4�����أ�ƽ�_���D���ӱۺͶ��U��ϻص��ھ��_ʼλ�á�
2���ɾ������������PLC�� 늚���ƌ��C-�-Һһ�w���ƌ�
1) PLC ָ��̡����ΈD���̌W����
2) PLC ����ܛ���ČW���cʹ�ã�
3) PLC �cӋ��C��ͨӍ���ھ��{ԇ��
4) PLC ��Һ�����ӿ����еđ����Լ����Ʒ����ă�����
���������c���c
1������_������܈䓰壨�����^���ܡ�����̎�����������_ʽ�Y�������Ʋ�����һ�w��
2��늚�������ƞ�����ʽ��Һ��վ������Һ���_����ȡ����w�Y���o�����f�{������ ���^�������ԏ����ɹ� 4-6 �ˌ�
3���ھ�Cе����������sС��ȫ���ٽY�������r����Һ��ϵ�y�������Ҫ��ģ�M�� ���Cе�M�й�����
4���ھ�Cе�ǰ�����ĽY���c�sС�����������ɣ��܉��挍���w�F��Cе�Č��H���r�� ʹ�W���܉��ڌ��������˽���C���ĸ������ĽY���c����ԭ����
5�������Ʋ����քӿ��ơ� �Ԅӿ��ƃɷN��ʽ��
6�����������͉��z�ܣ��������_�� 25Mpa��
7��������©늱��o��ݔ��늉� 380V/220V������©�������^ 30mA ���Д��Դ�� � ����Ʋ���ֱ�� 24V �Դ���������^�����o����ֹ�`�����p���O�䡣
�ġ���Ҫ���g����
늙C��̖��M3P4H523 ���ʣ�0.75KW �D�٣�1420r/min
�ͱ���̖��VAI-15F-A3 ����������0-4Mpa �~��������8ml/rev
���γߴ磺1550×650×1800mm
�塢�����f��
1���oͣ �D�D��ϵ�y�\���£����´˰��o�����\��ֹͣ��
2���ք�-PLC �D�Q�_�P �D�D���D���_�P�Ɍ��F�^������ƻ� PLC ���̿��ơ� 3�����_�P �D�D���´˰��o����늙C�ù������{�������y�õ����艺���� 4���ӱ��� �D�D�ƄӲٿv�U�ӱ��������{�������yJ2 �ɿ��Ƅӱ������ٶȡ� 5���ӱ۽� �D�D�ƄӲٿv�U�ӱ��½����{�������y J1 �ɿ��Ƅӱ��½��ٶȡ� 6�����U�� �D�D�ƄӲٿv�U���U�������{�������yJ3 �ɿ��ƶ��U�����ٶȡ� 7�����U�� �D�D�ƄӲٿv�U���U�½����{�������yJ4 �ɿ��ƶ��U�½��ٶȡ� 8���P���� �D�D���´˰��o�P���������{�������yJ5 �ɿ����P�������ٶȡ� 9���P���� �D�D�ƄӲٿv�U�P���½����{�������yJ6 �ɿ����P���½��ٶȡ� 10�����D�_�� �D�D�ƄӲٿv�U���D�_���D�� 11�����D�_�� �D�D�ƄӲٿv�U���D�_���D��
12�������\�� �D�D���ք�-PLC �D�Q�_�P���D�� PLC λ�ã����´˰��o���Ƴ����\�С�
13������ֹͣ �D�D�ڳ����\���£����´˰��o���Ƴ����\��ֹͣ��
14���ɾ��̿����� �D�D���� FX1S-20MR
����Һ��ϵ�yԭ��D
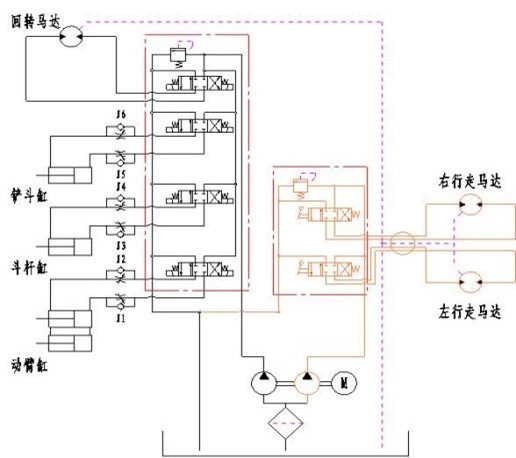
�D 2 Һ��ϵ�yԭ��D
�ߡ��ھ�C�������f��
(һ)���ơ����ЙC��
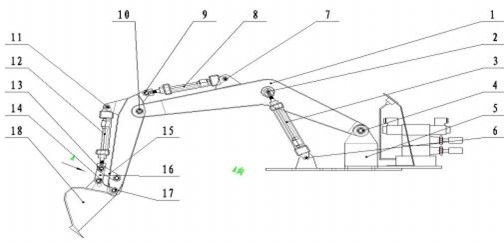
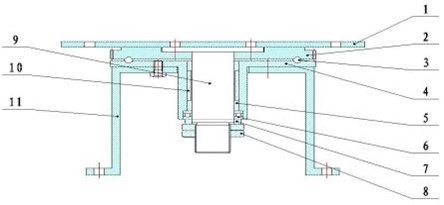
�D 3I �ھ�C�������f��
1���� �� �� �D �D����ۣ��Г��ھ�C���ھ����r�Ķ�λ��������ж���ȹ��ܣ����c��
�U���P���ĺ���������ھ��ܷ��_�����Ч������Ҫ���ء�
2���S �N I �D�D���ӱ��c�ӱ۸��B���S�N�������ӱۆ���֧�c��
3���� �� �� �D�Dؓ؟���ӱ���������λ�Ą���֧�Ρ�
4���S �N II �D�D���ӱ��c���D�_�B��֧�c���S�N����ʹ���ӱ��Դ��c��A�ġ��S�N I �c��돽���������\�ӡ�
5��֧ �� �� I �D�D���ӱ�֧������
6��֧ �� �� II �D�D�ӱ۸�֧������
7��֧���� III �D�D���U��֧������
8���� �U �� �D�Dؓ؟���U��s��
9���S �N III �D�D���U�c���U���B���S��
10���S �N IV �D�D���U�c���ӱ��B��֧�c��
11��֧���� IV �D�D�P����֧������
12���P �� �� �D�D�˸�ؓ؟�P�����ڡ�ж��
13���S �N V �D�D�P�����c�B�Ӱ���B���S��
14���S �N VI �D�D�P���c�B�Ӱ���B���S��
15���B �Ӱ� I �D�D�P�����c���U���B�Ӱ塣
16���B�Ӱ� II �D�D�P�����c�P�����B�Ӱ塣
17���S �N VII �D�D�P���c���U���B���S��
18���P �� �D�D�ڡ�ж���Ĉ��ЙC����
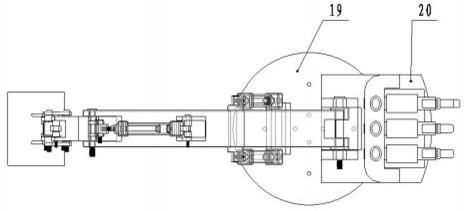
�D 3II �ھ�C�������f��
19�����Dƽ�_ �D�D���п��ơ����ЙC����֧��ƽ�_�����²��c�R�_���D�����B�ӣ����� �R�_����ʹ���в�λ��ָ���Ƕ��ھ�
20���y �� �D�D����Ԫ���c�@ʾ�x��֧�ΰ塣
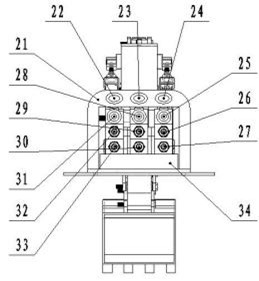
�D 4 �ھ�C���Ʋ����f��
21���x �� �P �D�Dϵ�y�������@ʾ�P��
22���� �� �� I �D�D�P�����������@ʾ��
23�������� II �D�D���U���������@ʾ��
24�������� III �D�D���ӱ۹��������@ʾ��
25���Q �� �y I �D�D���ӱ��콵�����y��
26���� �� �y I �D�D���ӱ��콵�ٶȿ����y��
27���� �� �y �D�Dϵ�y���������y��
28���Q���y II �D�D���U��s�����y��
29�������y II �D�D���U����ٶȿ����y��
30�������y III �D�D���U�s���ٶȿ����y��
31���Q���y III �D�D�P����s�����y��
32�������y IV �D�D�P������ٶȿ����y��
33�������y V �D�D�P���s���ٶȿ����y��
34���y �� �D�D�����y�ĵ�����
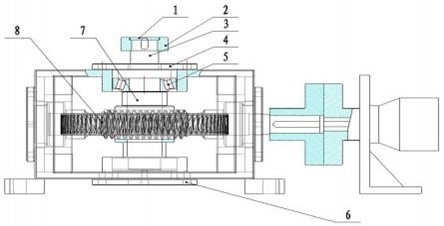
(��)���D�C�� I
1���� �D ƽ �_ �D�D���п��ơ����ЙC����֧��ƽ�_�����²��c�R�_���D�����B�ӣ����� �R�_����ʹ���в�λ��ָ���Ƕ��ھ��c�� 19 헣�
2�������D�X݆ �D�D���Ӵ��X݆���c�����Dƽ�_�Y�Ϙ������D�C����
3���L �� �D�D���X݆�c�̶����g���ã��������cƽ���S��ͬ��
4���L �� �� �D�D�L�����D������
5���� �~ �S�� �D�D���D�S�S�ס�
6���S �� I �D�Dƽ���������S�С�
7���| Ȧ �D�Dƽ��|Ȧ��
8���� ĸ �D�D���Ǽ�������ĸ��
9���� �X ݆�S �D�D���X݆��λ�S��
10���� �� �D�D���S��λ���ס�
11��֧ �� �D�D���w֧����
(��)���D�C�� II
�D 6I �ھ�C���D�����f��
1���w �� �D�DС�X݆��λ�w�塣
2��С �X ݆ �D�D����С�X݆���c���X݆���ώ����ϲ����ЙC�����D��
3��ݔ �� �S �D�D݆ݔ���S��
4�� �w I �D�D݆ݔ���S�w��
5���S �� II �D�Dݔ���S�ÈA�F�L���S�С�
6���� �w I �D�D݆ݔ���S���w��
7���� λ �� �D�D݆��λ�ס�
8�� ݆ �D�D݆���������ӡ��p�ٵ����á�
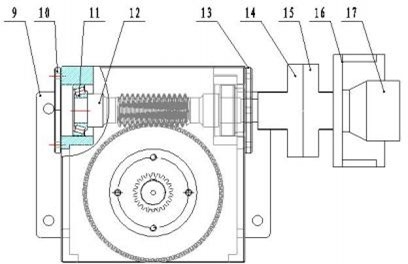
�D 6II �ھ�C���D�����f��
9��݆�p�ٙC�C��
10���� �w II �D�D�U�S���w��
11���S �� III �D�D�U�S�ÈA�F�L���S�С�
12�� �U �D�D�R�_�����U���U�c݆�M��һ���Ӹ����p���c�������á�
13�� �w II �D�D�S�S�w��
14�� �S �� I �D�D�p�ٙC���S����
15�� �S�� II �D�D�R�_���S����
16���� �� �D�D�R�_������
17���R �_ �D�D�S�������R�_��
�ˡ��_�Cǰ�z��
1���_�Cǰ�z�����λ�Пo�����F�������y�_����ȫ�_�������_�C���˲�g��ֵ�������� λ���o©�͡���푡���ζ���͜��^�߬F��
2���z����������B�ӹ̶���r���o���Ʉӵ���ĸ����˨���S�N�����ܽ��^��
3���z�鹤���b�ù�����r���ھ����������D��ж���ȹ����������ӱۡ����ۡ��ڶ���Һ ���Ȳ������q��̎�����͕����
4���z������O�乤����r����
�š�����ע�����
1�����Ԫ�����Y�����òĵ������ԣ��ڌ����^���Єձ�ע�ⷀ���p�ŷ�ֹ��ײ���ڻ� ·����^���д_�J���b���ןo�`�����M�мӉ���
2�������֮ǰ�����ϤԪ�����Ĺ���ԭ���̈́����ėl�������տ��ٽM�ϵķ������^����ֹ ���в�ж����Ҫ������Ť���NԪ�����ֱ�����������˞�p�ġ�
3��Ո��Ҫ��ؓ�d���ӣ�Ҫ�������y���ɣ�������p�ĉ�������
4���W�������r�����������{��̫��(�������������� 4��7MPa)��
5���W��ʹ�ñ����ϵ�y֮ǰһ��Ҫ�˽�Һ�����ʄt���˽Ȿ���ϵ�y�IJ���Ҏ�̣��ڌ� ��ώ���ָ�����M�У�����äĿ�M�Ќ�
6���W������^���У��l�F��·���κ�һ̎�І��}���˕r�������P�]�ã�ֻ�Ю���·ጉ��� ���������M�Ќ�
7������ꮅ��Ҫ������Ԫ������ע���Ԫ���ı��B�͌���_��������
8�������ͱ�늙C��Ч�ʣ����Ӌ��r��һ��ȡ80%��
9������·�Ӳ��õ����_�]ʽ���ٽ��^�����r����·����һ���ĉ���������С�� 7 ��/ �֕r���ɺ��Բ�Ӌ���������� 7 ��/�֕rÿ���_�]ʽ���^�����s�� 0.1��0.4Mpa��
ʮ�����E
�n�̌����քӿ��ƺ� PLC ���ƣ��քӿ�����Ҫ�ɰ��o������PLC ���������B�W�����̿� ��������
���m�ٿv���B؞�����ɷN�������ھ�C��ѭ�h���I�ęCе��ÿ�����Iѭ�h������������ۡ� ���D��ж�������D�ͽ���� 6 �������M�ɡ����^���m�������nj����� 6 ���������_ȥ�������� ��һ��������������һ���������B؞�������������^���У�ʹ�ڶ������U����ۺͻ��D�ٿv�U �����o���Ą��������Ѕf�{������������ڱM���̵ĕr�g�ȣ����һ�����Iѭ�h��������ھ�C���IЧ�ʡ��B؞�����ķ��������Ҫ�I���¡�
1���������ڶ��c��ۡ����U�ٿv�U����ϣ�
�����r�����ȑ������´�ۉ�ס�ڶ���ʹ�ڶ����������ķ����������𣬴˕r��ۿ����y �ٿv�U�����o�����������λ�á��ڶ��_ʼ������۵ĉ���ʹ�ڶ��������У� ���������� ������ʹ�ڶ��������ٶȜp������ֹͣ��څ�ݣ��@�r������������ۣ��������ڶ��ٿv�U�� �o�������ڶ��ھ��ٶ�����ߺ��������ɴ�۲ٿv�U�����o����ʹ��۲�����������������^ ܛ���ڶ���������̫���������ڝM���r�������r�Խ���ۣ������ھ���ȡ���˷��ͣ�ʹ�ڶ� ��ͣ�����D�ھ��ڱM���̵ĕr�g���b�M������
����������ϵ��P�I�Ǵ�۵������r�C��횼��r�ʴ_��Ҫ���粻�������߲��͡�
�ھ���ھ�C�^���������r������Ҫ�ջض��U�����ʹ�ۣ�ʹ�ڶ��������У��˕r��Ҫע ҕ�ڶ����D���ٶȣ����r�ա��춷�U�����ڶ����D�ٶ��^��r���ڶ��ھ����̫�٣�Ҫ���ն� �U�����D�ٶ��^���r���ڶ��ھ�������^�࣬Ҫ���rǰ�춷�U���Ա��C�ڶ���ͣ���ھ�������
����������ϵ��P�I�Ƕ��U���\��Ҫ���r�ʴ_��
2�����D������c���D�ٿv�U����ϣ�
����c�D�P���D�ٿv�U�����o������������D�P���D���M�еġ������ڶ������Y������ ������ۣ����ڶ��x�_����r��Ҫ����ʹ�D�P���D��ʹ��������D���^�m���ߵ���Ҫ�ĸ߶ȡ� �@�r�������ֵ�ע����Ҫ�^���ڶ����x�ظ߶Ⱥ��ڶ�ǰ���Пo�ϵK����Ŀ�y�ڶ��߶Ȳ��� Խ�^�ϵK��r��Ҫ�������D�ٶȻ�ֹͣ�D�ӣ�ʹ����Mһ�����ߺ��^�m���D��
3��ж�������D�c�ڶ��ٿv����ϣ�
���D�c�ڶ��ٿv�U�����o�������Ҳ���D�P���D�^�����M�еġ��@�r�������ˆTҪעҕ�� ����λ�ã����ڶ��M��ж���^�������ٿv�ڶ��ٿv�U�����o��ʹ֮ж�������ڶ�ж���s 1��2 �r�� �_ʼ�ٿv���D�Ȍ��y�ٿv�U�����o����ʹ�D�P���D����ʹ�ڶ��ڻ��D���^�mж����ֱ��ж���ֹ�� ���@һ�^���У������ˆTע����Ҫ�����ڶ�ж���ϣ������ж���^���ڶ�����ж������Ҫ��ͣ ���D��ʹ�ڶ�ж���������^�m���D������ڶ��ѽ��|�����������ȵ���߀δȫ��ж�꣬�˕r�� ��һ�´�ۺ���ж����Ҳ��߅�����߅ж����
4�����D�����D�c��۲ٿv�U����ϣ�
���ڶ��ȵ�����ȫж���������^���D���^���У���Ѹ��ʹ����½������ڶ���Ҫ�������� �^�r���_ʼ�������D�ٿv�U�����o����ʹ�ڶ�ƽ����ͣ������λ�ã��������½���ۣ�ʹ�ڶ��o �_���ز��������У��_ʼ��һѭ�h���������I��
�ھ�C��ѭ�h���I�^���У��ɂ��Ȍ��y�����U��������ϡ��f�{�����ģ���ijһ�r�g�ȣ��ɂ��ٿv�U�����o��ͬ�r�������Ķ���ʹ�ھ�C�����b�ò�ͣ�ع������_���˹�ʡ�r�g���p�� �������ġ�������a�ʵ�Ŀ�ġ�
ʮһ �������I(����)
1 ���������ھ�
�� ��ֱ���ھ�
���������Ⱥ��ڶ����Ȼ�����ͬ�r���Ɍ��ھ�C�������ھ�����ľ��ϣ��������M��ֱ�� �ھ��ڵ���Ҫ�����Ⱥ����Ƅ��ھ�C��ֱ��ȫ�����꣮
�� �����������ھ�
�ھ�����������r����ʹ�ھ�ĵ�һֱ�����ֳ��^�ڶ�ֱ���������ľ���Ȼ���{���ھ� ����ʹ�ڶ��c��ǰ�ںõĺ�����㕽ӣ��@�N�ھ���͵Ĝ������۾��Σ��D��̎�����ǣ���� ��Ҫ���Ǖr���ھ�C�t�谴�����돽���ľ������{���ھ��˷N�ھ����I�ʵͣ�һ�� �������ã�
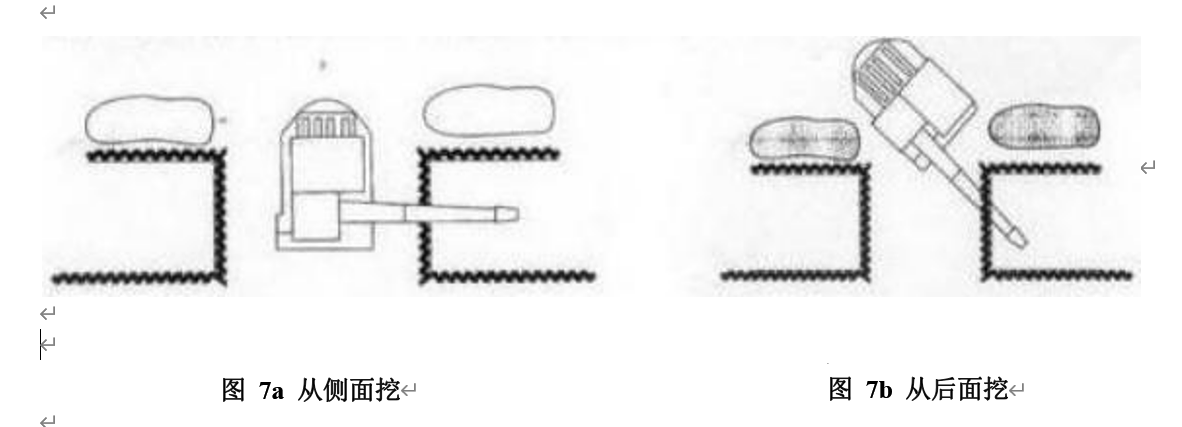
�� �������Y�ϲ����ھ�
�ھ�����Y�ϲ��r���������οɏăɶ˻�һ�˰��˶����_�ڣ�ֱ���v�����^�m�ھ��ֹ�� Ȼ���ھ�C�_�����ٳ� �� �� °ͣ���ڜ������ľ��ϣ��Ă����^�m�ھ���D 7a ��ʾ����� ���ھ�C�_�x�������ľ����ĺ��ھ�ʣ�ಿ�֣���D 7b ��ʾ��
�� �������ػ����ھ�
�� ��С�ͽ����ػ����ھ�
�ھ�С�ͽ����ػ��ɲ��ö����ھ͂����ھ�
�� �� �������ھ����ڽ����ػ���һ�Ȼ�ɂȾ���ж������r�²��ã�ҕ���Ηl�����ھ�C�ؽ����ػ����ľ�һ�˵��M�����һ���_�M���Iλ�ã��Ķ����_ʼ�ھ�
�����ھ�ɲ��ü��ڷ�����ڷ���
·���ڷ������Ã�߅�ھ����ھ�C�õ�܇�ķ���ͣ�ڽ����ػ���һ�ȣ�܇�����ľ�λ �ڽ����ػ�һ�Ș˾��ăȂȣ��c�˾�ƽ�У�����һ�����x����ʹ�ڶ���Ⱦo���˾�������������u�����ػ������ھ��ڳ�������ж�������˾���һ�ȣ�һ ֱ�ڵ������ػ�������Ȟ�ֹ��Ȼ���ھ�C�{����һ����ͬ�ӵķ����ھ� �� �� �� �������r�� ��������{����һ���ھ��һ���ھ� �� �� �� ����������˶�ε��{܇�������ػ����꣮��� �����ػ��^խ�r�������� �� �� �� �� �� �� �� ������M���ھ���������ػ��Č��ȳ��^ �� ��r�� ��������һ�ȣ��� �� �� �� �� �� �� �� �� �� ��������һ�ȡ��˷N�ھ����c���܌��^�ֵ��� ���ڳ����Խ���ʽ�������ɡ������ڙCе�Ƅ��l����Ӱ����I�ʡ��ڹ����΄ղ�̫�غ������� �T���^�ٵ���r�£��ɲ��ô˷N�ھ���
·���ڷ������ھ�Cͣ�ڽ����ػ����g����ʹ܇�����ľ��c�����ػ����ľ����غϣ����� �������߅�ھ��ڳ�������ж�ڽ����ػ��ɂȻ�ָ����λ�á���һ�������������ֱ���� ܇�����ڵڶ��������棬��Ҫע���c��һ�����������ӣ�ֱ�������ֹ���˷N �ھ��ܳ�ְl�]�Cе�����IЧ�ʣ����Ӄ�����������Ҫ�^����˹��������ڹ����΄��� �������ˆT�����r�£��ɲ��ô˷N�ھ��������ھ�����Ηl������ֻ����һ߅ж���r�� �ھ�C����������ػ����ľ���ж��һ���\�У��@�ӿ�������ж������ ����e������ж����������IЧ�ʡ�
�� �� �������ھ��ھ�C�ɽ����ػ������_�ڣ�����������r�²��ã��ٽ����ػ��Ĕ��� С���ھ�C�ھ�돽�܉�һ���ھ�������ػ��Ĕ��棬������ֻ��һ��ж���r���Æ����ھ� �����ڽ����ػ������^�������^�ھ�C�ھ�돽���ھ�Cֻ���ؽ����ػ��ăɂ��_�ڕr�����p �����ھ�������p�����ھ����ػ���
�Ă����ھ����ػ��r���ھ�C��ͣ���ڿӵ�һ��߅���ϣ��Cе��݆�ɴ�ֱ�ڻ�ƽ���ڽ� ���ػ����澀���á�
�� �����ͽ����ػ����ھ�
���ͽ����ػ����ھ�ɲ��÷��P�����b�õķ����M�У������]���ھ����g�� �� �Εrж�������y������������C�����ھ�Cж���������Ƴ������ػ��˾����⡣����䷭���� ܇�������\�����Բ�Ӱ푵ڣ��ε��ھ�
�� �����ͽ����ػ����ھ�
���ͽ����ػ����ھ��Ը�����r�����ö��г̵ķ�ʽ�ͷ��ھ��_��������档�ھ�
�r�����ԆΙC���I��Ҳ���Զ��Cͬ�r���I�������džΙC����Cͬ�r���I��������������ͬ��� �ęCе܇�v��ό�ʩ��
�� �� �����г̵��ھ�Ҫ�����ػ��ɂȶѷ�������λ��Ҫ�����ؽ����� ������ �� �ھ����������������C������܇�v����\���h̎���Բ�Ӱ��_�� �� �� �� ���档�ھ� ���I�r���ھ�C�����Ηl����ȡ�ؽ����ػ����ģ���ǰ�������M�����Iλ�ã��ھ�������� ���ѷ��� �� �� ��λ���ϣ�Ȼ���������C���������ػ��ɂ��^�h̎������������IЧ�ʣ��ھ� �C�������C��ע��fͬ�����_ʼ�ھ��һ�������ѷ��ڽ����ػ����҂ȣ���һ��ѷ�����ȕr�� �����C�������҂����������ν����M���_�ں����\�������˷N�������I���ھ�Cʼ�K��90° ������ѭ�h�������s���˹���ѭ�h�r�g�����I�ʿɵõ���ߡ�
�� �� �����ھ����ͽ����ػ��^��ھ�Cһ���ھ����_��������ȕr���ɲ��÷� ���ھ�ķ����_��������ȣ���D 11b ��ʾ��
���ھ�ĴΔ����������ͽ����ػ�����Ⱥ��ھ�C���ھ���ȶ�����һ��ɷ� �� �ӡ� ��
�Ӽ��ɝM���ھ����ػ���ȵ�Ҫ�����ǷփɌ��ھ�һ�Ӱ��������֎ׂ��г̵��ھ� ���M�С�����ӵ���Ҫƽ�������������C���M��·���I���M�д���ƽ���r���ɸ����ڶ���Ҫ�_ �ڵĔ��棬�Q���֎ׂ��г��^�m�_�ڡ�����փɂ��г��ھ�r���ھ�C����ͣ���� �� �� �� ֮�g�� ��ж܇�tͣ�� �� �� ��֮�g���ھ�C��һ������ǰ�M����һ���ڵ� �� ���A����Ⱥ͌��ȡ������� ���v���漴���ڵ������L�ȕr���ھ���ȑ��pС���Ա㘋��б�£�������һ�������I���^�m�_ �� �� �Ĕ���r���ھ�Cͣ���� �� �� ��֮�g�� ��ж܇�tͣ�� �� ��λ���ϡ��@�N���I�������ھ�C��90 °������ѭ�h������ѭ�h�r�g�̣����IЧ���^�ߡ�ͬ�r������ �� ����r���ڶ��������� �ܸߣ����Ɍ������b��܇�ȣ���ʡ�r�g��������������IЧ�ʡ���� �� ���M��·�^�m�ھ� ������Ҫ��
�� ��ƽ�������ػ�������
�ھ���ͽ����ػ��r�����˜p�ٹ������ͱ��ڙCе܇�v�ڿӃ�ͨ�У�����Ҫ���ƽ��Ӳ�� ���棬�˷N����һ���������C�����ɣ����]�������C��ϕr�������ھ�Cƽ���͉�����
�� �� ��ƽ���͉�����ƽ�������ػ���һ�N�y���^������I��ƽ�����P�I�Ǵ�ۺͶ��U���� ����ϣ����C�ڶ����ص���ƽ���Ƅӣ�ʹ�ڶ������ڳ����ڿӵ�����������ֲ��Ɖ��^Ӳ�ĵ� �档��ٿvҪ�I�ǣ�ǰ���ڶ��½���ۣ�ʹ���X���½��|���棻 ���ն��U��������ۣ�ʹ�ڶ� ˮƽ�Ƅӡ�
���ն��U��Ŀ�ģ������ڶ�����ɢ���������ھ�C�����Քn���ڳ����ڵ�������ӡ����� ��۵�Ŀ�ģ��t�DZ��C�ڶ�����ƽ��ƽ���Ƅӡ���ˣ������ˆT��ƽ���^����Ҫ�r��ע��X ��λ�ã������X�����P�������r��Ҫ���r�{���ڶ��߶ȡ����l�F���X���ƽ����������r��Ҫ ���r������ۣ��綷�Xλ�ø�������߶ȕr��Ҫ���r�Խ���ۣ�ʹ�����ƽ���^�������S���U�����λ�õĸߵͶ��������Ķ����C�ڶ��ص�ƽ��ƽ���Ƅӡ�
���ն��U�^���У���l�F�ڶ�ǰ���ѷe�^��������������^������ӕr��Ҫ���r�ն��ڳ��� ��ע���ھ����ȣ���Ҫ�Ɖ�Ӳ��ƽ�棬��t����������������
�������ӕr��Ҫ���ջض��Uʹ�䴹ֱ����ʹ����ƽ�����أ�Ȼ���½���ۣ������������� �����������������^��Ҫ�������Ӊ�����һ���������һ�㲻����30cm���ډ����� �ӕr���м��Û_���ķ���������
�� �� ���ν����ػ�߅�£����ھ���ͽ����ػ���һ헱ز����ٵ����I�������Iǰ���� ���ֱ����Ϥ�¶�Ҫ���]��ʩ���������������¶ȘӰ壬���A�������¶ȘӰ�ߣ��Ա��� ʩ���^�����S�r�z�顣
��߅�£�Ҫ����߅�µ���\���ھ�C���������x���ھ�C��ͣ��λ�á����ÆΙC���^ ���߅�r�������b�ã��ڶ��������쵽�ӵ�߅�µ����أ������ھ�Cͣ����߅�µ���߅�� �����µ��ϰ벿�֣�Ȼ���Ƅ��ھ�C���ӵף������µ��°벿�֣���������䵽�Ӄȵ� ������ʹ�ӵ�ƽ�������Ã��_�ھ�C��ͬһ���^���߅�r�����_�ھ�CҪ�քe����߅�µ� ��߅�غͿӵף�������߅���ھ�C���ϰ벿�֣���߅���ھ�C���µ��°벿�֣���ؓ؟�� ���ӵ׃ȵ����������C�ӵ�ƽ�����Μ\��߅�r�������b�ã��ڶ��������쵽߅�µ���߅�أ� �ھ�CҪ���ڿӃȣ��ڶ��������¹��ޡ�
��߅�µ�Ҫ�I�cƽ�������ػ�������ͬ��������ע�����c���U����ϣ��ʴ_Ŀ�y���X �ĸ߶ȣ�ʹ���ܰ��¶ȘӰ��Ҫ���Ρ����ε��^���������^������ӕr���ɿ������ڣ��� ������������ӽ��¶�Ҫ��r��Ҫ�\�ڡ����ڣ��Ա�ʴ_���_���¶�Ҫ��
�� ���ھ��b܇
�ھ�C�ھ��b܇�r�������ھ����ػ��ķ����M�С�
�� �� �����������������I�档�����һ���b܇�����������^��ʹ���D�Ƕ��������ӣ� ���������^С����ʹ�ھ�C��λ�Δ����ࡣ
�� �� ���ھ�����Ӻ��Ҫ�m�����^��r�����÷��ھ�����̫���r�����������C���n �����Ѻ����M���b܇���I��
�� �� ��ע�ⰲȫ�������ھ�C�c��ж܇�l����ײ��