
����ߡ��p�u�U�C��
һ�����Ŀ��1���˽��p�u�U�C�����b�估���\�����ԡ�
2��Ӗ���W���Ĺ��̌��`�������������B�W���Ą������R���C���OӋ��������
3������W����ƽ��C���M��ԭ�������⡣
�������ԭ��
�κ�ƽ��C�������������ɶȵėU�M�����B�ӵ�ԭ�Ӽ��͙C����ȥ�ķ������M�ɣ��@�ǙC���ĽM��ԭ����Ҳ�DZ����Ļ���ԭ��
��������O�估����
1������_�C��
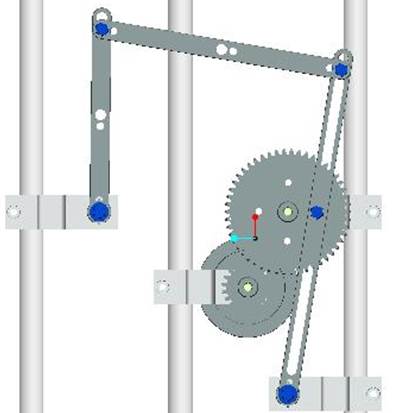
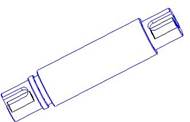
����_�C����D2��ʾ���C������5���U���Ļ����U����������X�S�����Ƅӣ��̶��������^��ᔺ͵�����ĸ�̶������ƄӕrՈ�Ȍ�������ĸ���_���p���Ƅӻ����U.���M����ʹ�����ִ�ֱ��B�������U�ϵĻ��K����Z�S�����Ƅӣ��Ã�������ᔌ����K�o���ڻ����U�ϡ���ע�⣺���Ƅ������K�r����ֱ�������������������λ���ٰ���ᔔQ�o����
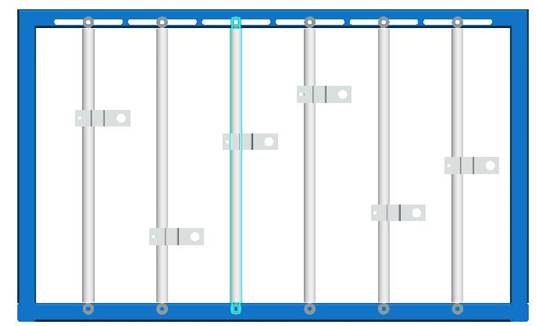
�D2 �C��
2�������M��
| ��̖ | �� �Q | ʾ �� �D | Ҏ �� | ���� | �� ע |
|
1 |
�����S��݆ |
 |
1 | ||
|
2 |
늙C�S��݆ |
 |
1 | ||
|
3 |
�� �S |
 |
2 | ||
|
4 |
С �X ݆ |
 |
Z=20 | 1 | |
|
5 |
�� �X ݆ |
Z=50 | 1 | ||
|
6 |
�B �U |
|
L=350 | 1 | |
|
7 |
�B �U |
|
L=250 | 1 | |
|
8 |
�B �U |
|
L=200 | 1 | |
|
8 |
�� �� |
|
T����ȣ�=2 | 4 | |
|
9 |
�N �S �� � |
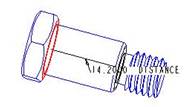 |
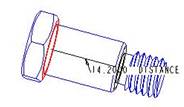
L=14.2 | 4 | |
|
10 |
�� �� |
|
T����ȣ�=4 | 1 | |
|
11 |
�N �S �� � |
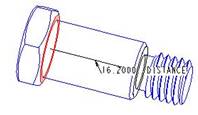 |
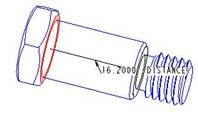
L=16.2 | 1 | |
|
13 |
�� � �� |
 |
T����ȣ�=24 | 2 | |
| 14 |
�� �� �S |
 |
2 | ||
|
15 |
�� �w |
 |
3 | ||
|
16 |
�� �h |
 |
2 |
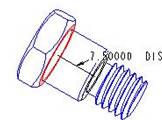
�ṩM5ƽ�^��ᔡ�M3�A�^��ᔡ������ǰ���һ�ף�1m����һ�ѣ��_�ڰ���1����
�ġ�����_�b��D����ը�D
�b �� �D

���ˡ�ţ�^�ٴ��C��
һ�����Ŀ��
1���˽�ţ�^�ٴ��C�����b�估���\�����ԡ�
2��Ӗ���W���Ĺ��̌��`�������������B�W���Ą������R���C���OӋ��������
3������W����ƽ��C���M��ԭ�������⡣
�������ԭ��
�κ�ƽ��C�������������ɶȵėU�M�����B�ӵ�ԭ�Ӽ��͙C����ȥ�ķ������M�ɣ��@�ǙC���ĽM��ԭ����Ҳ�DZ����Ļ���ԭ��
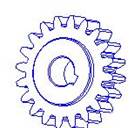
1��ţ�^�ٴ��C��
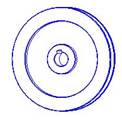
�Y���f�����������c����D1��ʾ��ţ�^���^�Ą�������늙C��Ƥ�������g���֞��������U�����������\�ӎ��ӌ��U�[�ӣ��ٵ������U���K��������ֱ���\�ӣ��Ķ��������������
��������O�估����
1������_�C��
����_�C����D2��ʾ���C������5���U���Ļ����U����������X�S�����Ƅӣ��̶��������^��ᔺ͵�����ĸ�̶������ƄӕrՈ�Ȍ�������ĸ���_���p���Ƅӻ����U.���M����ʹ�����ִ�ֱ��B�������U�ϵĻ��K����Z�S�����Ƅӣ��Ã�������ᔌ����K�o���ڻ����U�ϡ���ע�⣺���Ƅ������K�r����ֱ�������������������λ���ٰ���ᔔQ�o����
�D2 �C��
2�������M��
| ��̖ | �� �Q | ʾ �� �D | Ҏ �� | ���� | �� ע |
|
1 |
�����S��݆ |
 |
1 | ||
|
2 |
늙C�S��݆ |
 |
1 | ||
|
3 |
�� �S |
 |
2 | ||
|
4 |
С �X ݆ |
 |
Z=20 | 1 | |
|
5 |
�� �X ݆ |
Z=50 | 1 | ||
|
6 |
�B �U |
|
L=350 | 2 | |
|
7 |
T �� �K |
 |
1 | ||
|
8 |
�� �� |
|
T����ȣ�=2 | 2 | |
|
9 |
�N �S �� � |
 |
L=14.2 | 2 | |
|
10 |
�� �� |
|
T����ȣ�=4 | 1 | |
|
11 |
�N �S �� � |
 |
L=16.2 | 1 | |
|
12 |
�N �S �� � |
 |
L=7.5 | 2 | |
| 13 |
�� �� �S |
|
3 | ||
|
14 |
�� � �� |
 |
T����ȣ�=17 | 2 | |
|
15 |
�� � �� |
 |
T����ȣ�=31 | 1 | |
|
16 |
�� �w |
 |
3 | ||
|
17 |
�� �h |
 |
2 |
�ṩM5ƽ�^��ᔡ�M3�A�^��ᔡ������ǰ���һ�ף�1m����һ�ѣ��_�ڰ���1����
�ġ�����_�b��D����ը�D

�D3 �b��D

�D4 ��ը�D
�塢�����c���E
�řC������
�ٜy�L�rʹ�y�L�ęC���������\�ӣ���ԭ�Ә����_ʼ�м��^��C���\�ӣ�������\�ӆ�λ���_��ԭ�Ӽ����C�ܡ����Ӳ����͈��в������Ķ��_���M�əC���Ę�����Ŀ���\�Ӹ��Ĕ�Ŀ��
�ڸ����Ә����g�Ľ��|��r�������\�ӵ����|���_�������\�Ӹ��ķN�
��Ҫ�x�����ܱ��F�C��������ƽ������ҕ�Dƽ�档
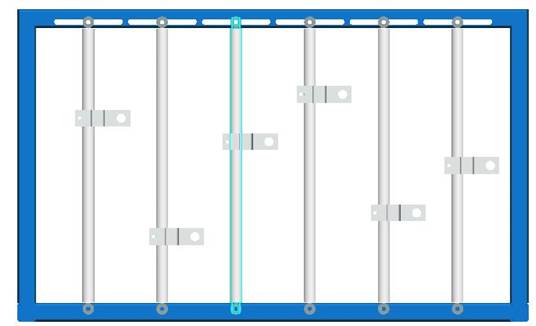
���ڸ弈��ͽ�ְ�Ҏ���ķ�̖���������Ӵ��������C���\�Ӻ��D�IJ݈D��Ȼ���Ô���1��2��3 …… �քe�˳�����������A��B��C …… �քe�˳����\�Ӹ���
���м��y���C�����\�ӳߴ磨���D�Ӹ��g�����ľࡢ�ƄӸ���·��λ�ã������ڸ߸��t���м��y���߸���݆����������λ�ã�Ȼ�����m���ı��������C���\�Ӻ��D
���L�ƙC���\�Ӻ��D�IJ��E
�ٸ���Cе�Č��H���졢����ԭ�����\����r��
�����\�ӂ��f·������һ����ÿ�ɂ�����֮�g�����\�ӵ����|���_���\�Ӹ�����ͺ͔�Ŀ��
��ǡ���x���\�Ӻ��D��ҕ�Dƽ�棬ͨ���x��Cе�ж����������\��ƽ���ҕ�Dƽ�档
���x��ǡ�������D�����ߡ�
�ݴ_�����\�Ӹ�������λ�ã��ø��\�Ӹ��Ĵ�����̖�����ÙC���\�Ӻ��D��̖�ͺ��ξ��l���L�ƙC���\�Ӻ��D��
����ԭ�Ӽ��Ϙ˳����^�Ա�ʾ���\�ӷ���