
���M늙C�ӿ���
һ�� ���Ŀ��1. �˽ⲽ�M늙C�Ĺ���ԭ����
2. ������FPGA�a���Ӳ��M늙C�ĕr��
3. ������FPGA�����Ʋ��M늙C�D�ӵ������^�̡�
���� ���ԭ��
���M늙C�ǹ��I���Ƽ��x���г��õĿ���Ԫ��֮һ�������ڙCе�b���п��Ծ��_���ƙCе�b�õ����D�Ƕȡ��ƄӾ��x�ȡ����M늙C����ֱ���Ô�����̖���ӣ�ʹ�÷dz����㡣���ⲽ�M늙C߀���п�����ͣ�����_���M�Ͷ�λ�����c��
���M늙C���H����һ������/�Ƕ��D�Q�������ಽ�M늙C�ĽY��ԭ�����D4-15-1��ʾ��
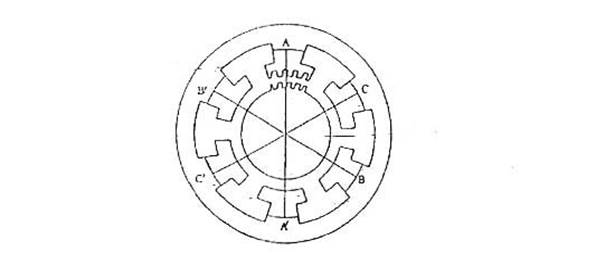
�D4-15-1 ���ಽ�M늙C�ĽY��ʾ��D
�ĈD�п��Կ�����늙C�Ķ����������ȷֵĴŘO��A��A’��B��B’��C��C’�������ăɂ��ŘO֮�g�A�Ǟ�60°�������ăɂ��ŘO�M��һ�M��A—A’��B—B’��C—C’������ijһ�@�M�����ͨ�^�r��ԓ�@�M�����ăɂ��ŘO�γ�N�O��S�O��ÿ���ŘO�ϸ����傀���ֲ��ľ���С�X��늙C���D������40������С�X����طֲ��ڈA���ϣ������ɂ��X֮�g�A�Ǟ�9°��
�Ů�ijһ���@�Mͨ늕r�������ĴŘO�ͮa���ň������c�D���D��һ���ĽǶȣ�ʹ�D�ӺͶ��ӵ��X����R���ɴ˿�Ҋ���e�X�Ǵ�ʹ���M늙C���D��ԭ��
�������������Ŀ��Ʒ�ʽ�У���A��ͨ늣�B��C���ͨ늣��ڴň�������ʹ�D���X��A��Ķ����X���R���҂��Դ������ʼ��B���O�cA��ŘO���ľ����R���D�ӵ��X��0̖�X������B��ŘO�cA��ŘO���120°����9°��������(120÷9=13 2/3) �����Դ˕r�D���X�]���cB�ඨ�ӵ��X������ֻ�ǵ�13̖С�X����B��ŘO�����ľ����c���ľ����3°������˕rͻȻ׃��B��ͨ늣�A��C�ͨ늣��tB��ŘO��ʹ13̖�D���X�c֮���R���D�Ӿ��D��3°���@��ʹ늙C�D��һ�����������A—AB—B—BC—C—CA—A����ͨ늄t�����D��ͨ�����������ĭh���}�_�������a�����M�}�_��
���\�D�ٶȵĿ��ơ�����׃ABC�����@�M�ߵ��ƽ�Č��ȣ��͕�����ͨ늺͔�늵�׃������׃����ʹ늙C�D�ٸ�׃�������{���}�_�����ھͿ��Կ��Ʋ��M늙C���\�D�ٶȡ�
�����D�ĽǶȿ��ơ����ݔ��һ��CP�}�_ʹ���M늙C�����@�M��B׃��һ�Σ������������Dһ���Ƕȣ����Բ��M늙C���D�ĽǶ���ݔ���CP�}�_���_����
���������ʹ�ò��M늙C��4�ಽ�M늙C����С���D�ǶȞ�7.5�ȣ��������D�ӿ��ƕr��������ʾ��ÿһ���}�_�������D�^7.5�ȡ�
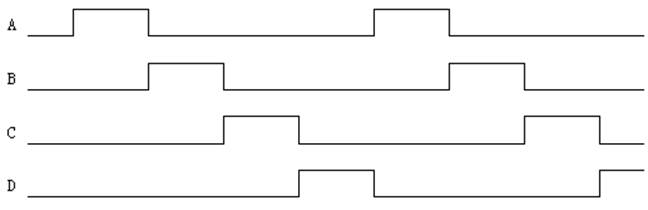
�����D�ӿ��ƕr�����£�
���� ������
�����Ҫ��ɵ��΄վ����OӋ���M늙C�Ŀ����·��ͨ�^һ���܄��_�PK1�����Ʋ��M늙C��형rᘺ���r����D��ͨ�^�˂����I�_�PBT1-BT8�����Ʋ��M늙C���D�ĽǶȡ�
�ġ� ���E
1�� ���_QUARTUSIIܛ�����½�һ�����̡�
2�� ���깤��֮�����½�һ��VHDL File�����_VHDL������Ԓ��
3�� ���Ռ��ԭ�����Լ����뷨����VHDL�����ھ���VHDL�����Ñ��Ʌ��չ�P���ṩ��ʾ������
4�� ������VHDL�����������������ͬ���һ��
5�� ���Լ����õĵij����M�о��g���棬����������e�`�M���ģ���Kͨ�^���g��
6�� ���g����o�`�����Ñ��Լ���Ҫ���M�й��_���䡣������ɺ����M��ȫ���gһ�Σ���ʹ���_������Ч��
7�� �����������Ì�����������_�����FPGA���_�c������ģ�K�B��������
������{�õı����ṩ��VHDL���a���t����B�����£�
Clk��FPGA��������r���̖��ݔ���1KHZ���ҡ�
Key7_5��key15��key30��key45��key90��key180��key360��key8���քe�������D7.5�ȡ�15�ȡ�30�ȡ�45�ȡ�90�ȡ�180�ȡ�360�ȺͶ��D���քe�c8�����I���B�����������İ��I�����Dz��M늙C�D�^�����ĽǶȡ�
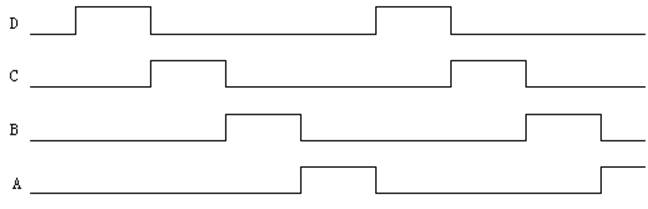
Keyorder�����D���������̖�cһ���܄��_�P���B�����ƽ�r���D�����ƽ�r���D��
Astep��bstep��cstep��dstep���քe�c���M늙Cģ�K��A��B��C��D���B��
8�� �����d��|ͨ�^JTAG�ڌ�������sof�ļ����d��FPGA�С��^�쌍�Y���Ƿ��c�Լ��ľ���˼��һ�¡�
�塢 ���Y���c�F��
���OӋ�ą���ʾ�����������OӋ�ļ����d��Ŀ���������Ӱ��I�_�PBT1-BT8�����M늙C�������ճ����OӋ�������IJ��M�Ƕ��M�����D���܄ӓ܄��_�P��K1�����M늙C���D�ķ����l����׃��
���� �����
1�� �L�����沨�Σ������f����
2�� �����ԭ�����OӋ�^�̡����g���沨�κͷ����Y����Ӳ���yԇ�Y��ӛ�����