�C��ҕ�X�̌W���ƽ�_���C��ҕ�X�̌W�O��
2023-02-11 20:13�C��ҕ�X�̌W��Ӗƽ�_
һ��ƽ�_����
1��ƽ�_����
�C��ҕ�X�̌W��Ӗƽ�_�����������Ӗ�I�����OӋ��һ��̌W��Ӗƽ�_��
�C��ҕ�X�̌W��Ӗƽ�_����3D�������C��2D���I���C�������N�ИI���õ��挍������̓�M����đ��È������ں�3Dҕ�Xϵ�y�{ԇ�����_�l��2Dҕ�Xϵ�y���ü��g���D�λ�ҕ�X̎�����g���C�����x�������c�{ԇ���g����ȌW���Ȍ�Ӗ���ܡ�
�C��ҕ�X�̌W��Ӗƽ�_�ṩ�������ƵČ�Ӗ�̲��c��Ӗҕ�l���ܝM��ҕ�X�㷨��ܛ�����Cе��늚��Լ��C�������P���I�ČW�T���_չ�C���ˏĻ��Aʾ�̡��x�����̡������sҕ�X�����_�l��֪�R�c�Č�Ӗ��
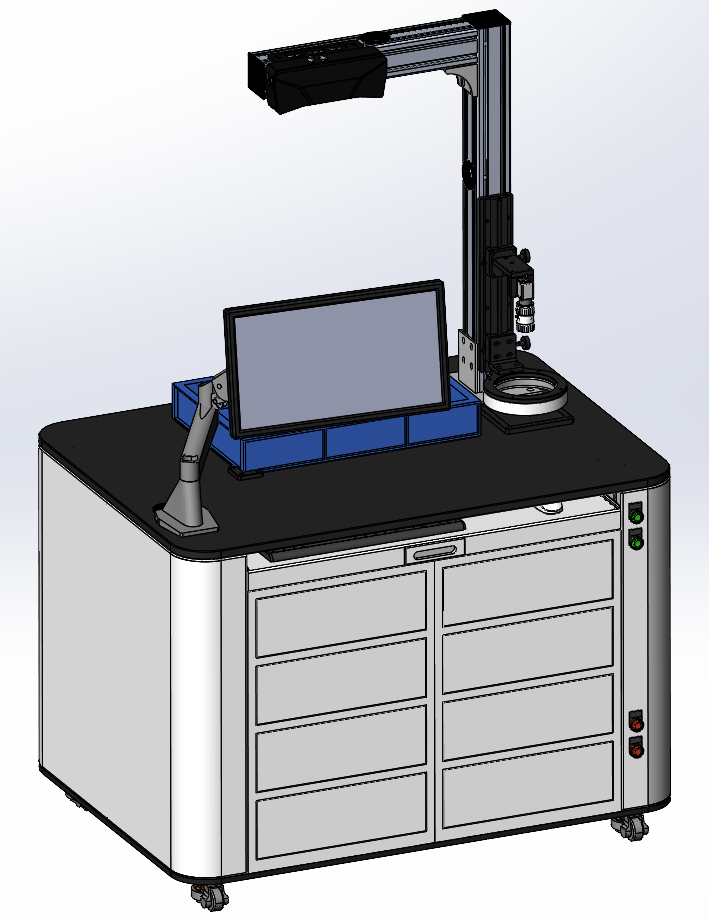
ƽ�_ģ�͈D

2�����g����
ݔ���Դ����������220V±10% 50Hz
3D���C��̖��proS 700C
2D���C��̖��A3B00MG000
2D�R�^��̖��MFA121-U25
2D��Դ��̖��CST-RS18030-B
�����h�����ض�-10�桫+40��
�������≤85%��25�棩
ƽ�_�ߴ磺1170 x 830x 1700mm
��ȫ���o������©늱��o����ȫ���χ��Ҙ˜�
3��ҕ�Xϵ�yģ�K
��1�����I��3D���C
�����̶ܳȸ�
�������M��ҕ�X�㷨����̎��������Լ����䡢�����؛Ʒ�ȵ������w���p�ɑ����S��ѯB���o����á�һ���̶ȷ��⡢��ɫ�ȏ��s���r��
�ڷ����ɿ�
Mech-Eye���I��3D���C�߂�IP65���o�ȼ������ڇ����ĭh���з����\�У�����ͨ�^CE��FCC��VCCI��RoHS�J�C��
���_���ԏ������θ�Ч
�ṩ���Z�ԡ���ƽ�_��SDK�x�ӿ��_�ţ����Ρ����x�����Mech-Vision��Mech-Vizʹ�ã��p�ɡ����ٲ����z�y/���y���á�

3D���I���C
��2�����I��2D���C
�ٽY���o�������ڼ���
�ߴ��29mm*29mm*29mm������USB3.0�����ӿڣ�5Gbps��Փ��ݔ������USB �ӿ�ֱ�ӹ�늣�֧��ܛ���|�l��Ӳ���|�l�������\�еȶ�Nģʽ��
���_���ԏ���������չ
����Windows��Linux����ϵ�y��֧��TWAIN��DirectShow�ӿڣ�SDK�_�l��֧��VC��VB��C#��Delphi��Labview���Z�ԣ�֧����Mech-Vision��Halcon��Labview��OpenCV��Matlab�ȵ�����ܛ����

2D���I���C
��3���D�λ�ҕ�X̎��ܛ��
��ȫ�D�λ���ҕ�Xܛ�����o�辎�����a������ɲ�⡢�o�����ϵ�ҕ�X���á�
����3Dҕ�X����ȌW����ǰ���㷨ģ�K���ɝM����s���ӵđ�������
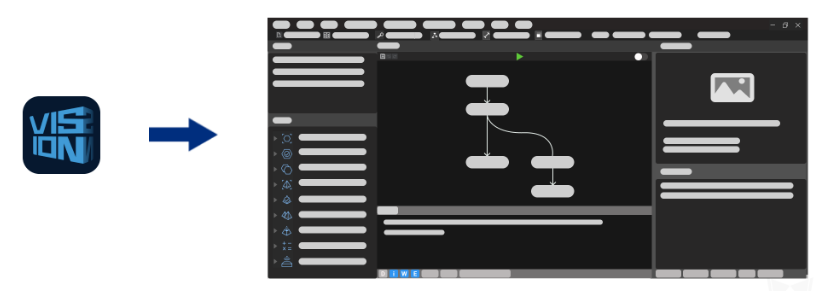
�D�λ�ҕ�X̎��ܛ��
��4���C�������ܾ���ܛ��
��ȫ�D�λ��ęC�������ܾ��̭h����֧�֔��\����
����܉�EҎ������ײ�z�y����a�������㷨���m������ⱊ������Ʒ�ƙC���ˣ���ABB��KUKA��FANUC��DENSO��UR��AUBO��JAKA�ȡ�
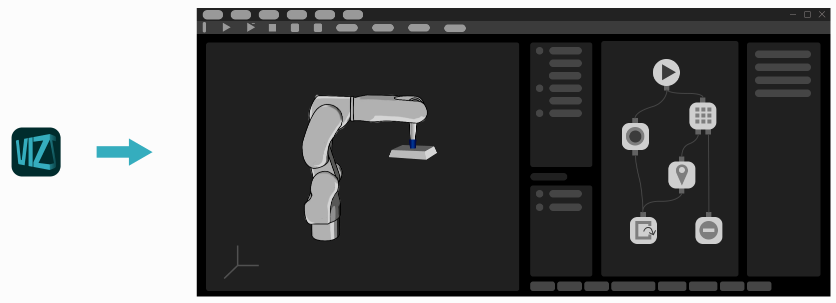
�C�������ܾ���ܛ��
��5���C��ҕ�X��ȌW��ƽ�_ܛ��
����ȱ�ݙz�y����������ָ�ȹ��ܣ��Ɍ����w�����R�e����λ���Д����w��B�Լ��z�yȱ���㷨��
��ȌW������Ӗ�����ߣ�����ȌW��ģ��Ӗ���Ĕ����ɼ����Y�x�����롢��ע��ģ��Ӗ������C�������õ��^���M��ȫ�������ϣ�������������������Ӗ��Ч�ʣ���ȫ�̱��C������ȫ�ԡ�

�C��ҕ�X��ȌW����������
������Ӗ�Ŀ
ԓƽ�_���10������Ӗ�Ŀ��ܛӲ���YԴ���������̡���Ӗ�����ęn����Ӗҕ�l�ȡ�
�����Լ����a�⡢늙C�D�����ϡ�䓽���Ӌ���ȑ��È������������ν�B��
1�������a��
ԓ�Ŀģ�M���H���I�����ļ����a�⡣
��������&��������

�����a�������&������
2��늙C�D������
ԓ�Ŀģ�M���H���I������늙C�D�����ϡ�
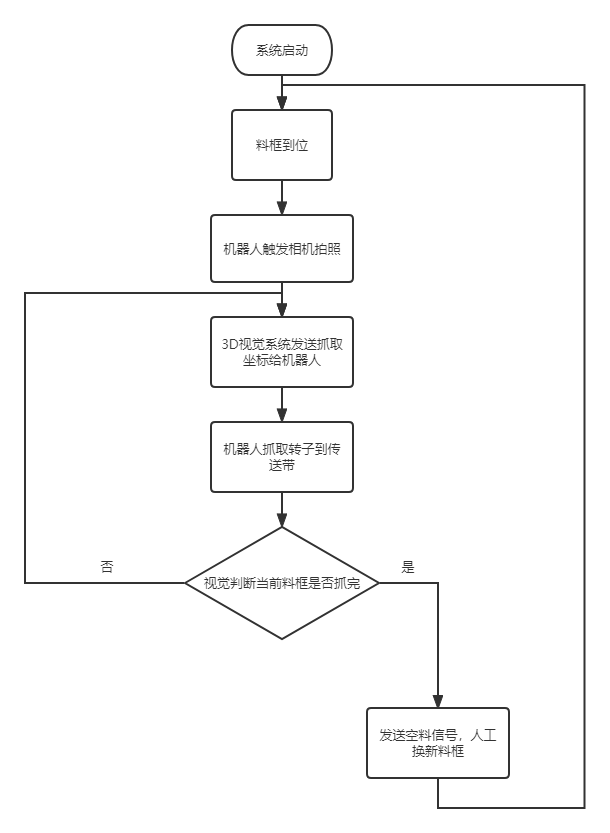
��������&��������
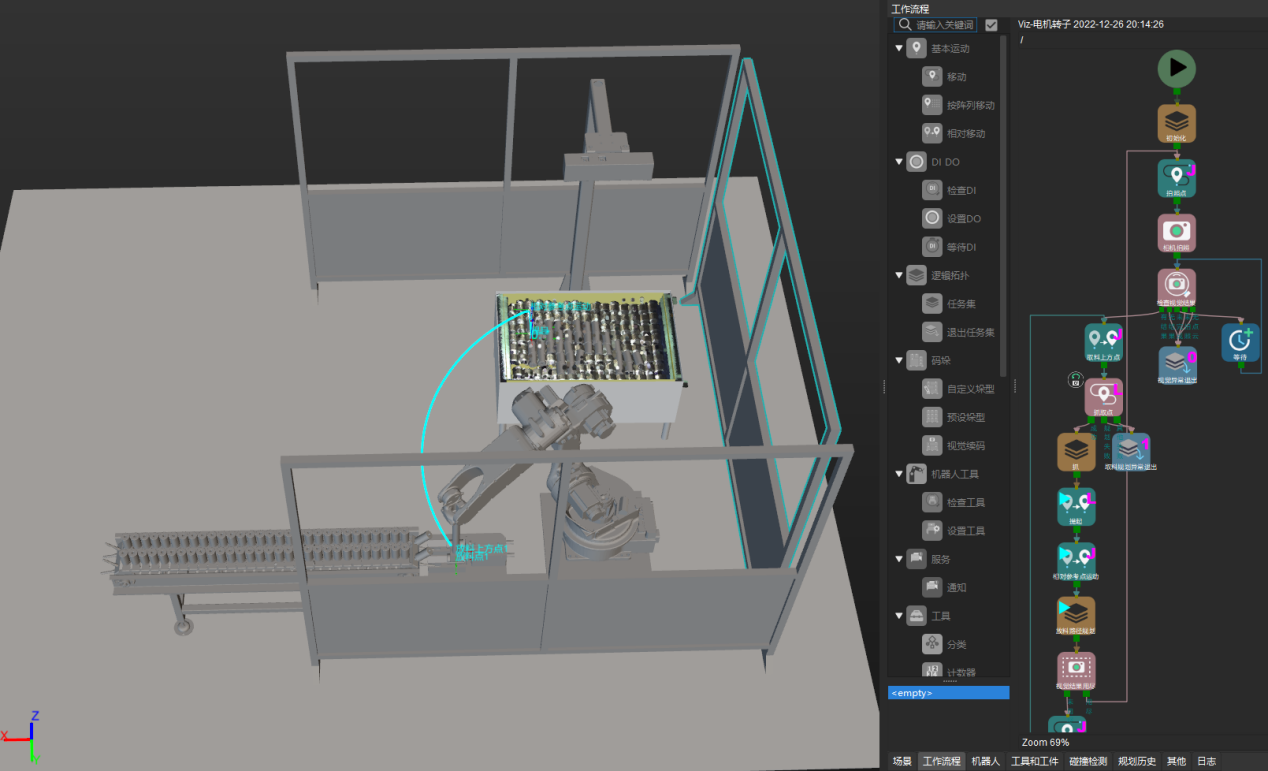
늙C�D�����Ϲ�������&���È���
3��䓽���Ӌ��
ԓ�Ŀģ�M���H���I������䓽���Ӌ����
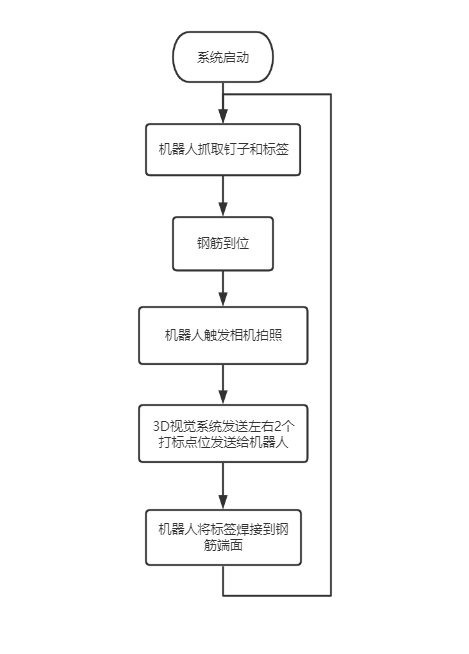
��������&��������
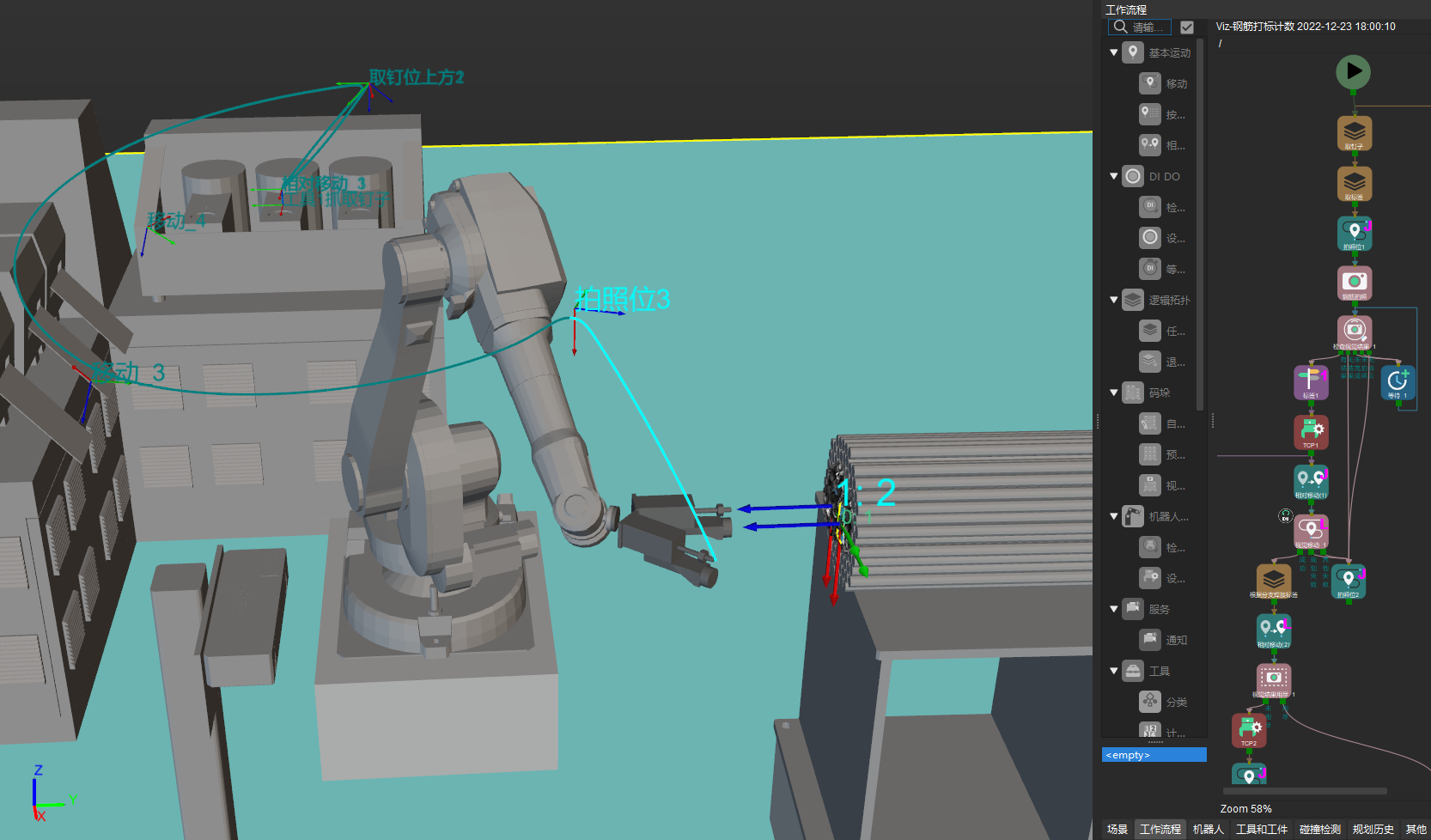
䓽���Ӌ����������&���È���
������Ӗ�n��
ƽ�_��֧�κ͘������n�̣����w��3Dҕ�X�����c���ü��ɡ�����AI+�C��ҕ�X���͑��ð������`���ȡ�
1����3Dҕ�X�����c���ü��ɡ���Ӗ�Ŀ
2����AI+�C��ҕ�X���͑��ð������`����Ӗ�Ŀ
1��ƽ�_����
�C��ҕ�X�̌W��Ӗƽ�_�����������Ӗ�I�����OӋ��һ��̌W��Ӗƽ�_��
�C��ҕ�X�̌W��Ӗƽ�_����3D�������C��2D���I���C�������N�ИI���õ��挍������̓�M����đ��È������ں�3Dҕ�Xϵ�y�{ԇ�����_�l��2Dҕ�Xϵ�y���ü��g���D�λ�ҕ�X̎�����g���C�����x�������c�{ԇ���g����ȌW���Ȍ�Ӗ���ܡ�
�C��ҕ�X�̌W��Ӗƽ�_�ṩ�������ƵČ�Ӗ�̲��c��Ӗҕ�l���ܝM��ҕ�X�㷨��ܛ�����Cе��늚��Լ��C�������P���I�ČW�T���_չ�C���ˏĻ��Aʾ�̡��x�����̡������sҕ�X�����_�l��֪�R�c�Č�Ӗ��
ƽ�_ģ�͈D
2�����g����
ݔ���Դ����������220V±10% 50Hz
3D���C��̖��proS 700C
2D���C��̖��A3B00MG000
2D�R�^��̖��MFA121-U25
2D��Դ��̖��CST-RS18030-B
�����h�����ض�-10�桫+40��
�������≤85%��25�棩
ƽ�_�ߴ磺1170 x 830x 1700mm
��ȫ���o������©늱��o����ȫ���χ��Ҙ˜�
3��ҕ�Xϵ�yģ�K
��1�����I��3D���C
�����̶ܳȸ�
�������M��ҕ�X�㷨����̎��������Լ����䡢�����؛Ʒ�ȵ������w���p�ɑ����S��ѯB���o����á�һ���̶ȷ��⡢��ɫ�ȏ��s���r��
�ڷ����ɿ�
Mech-Eye���I��3D���C�߂�IP65���o�ȼ������ڇ����ĭh���з����\�У�����ͨ�^CE��FCC��VCCI��RoHS�J�C��
���_���ԏ������θ�Ч
�ṩ���Z�ԡ���ƽ�_��SDK�x�ӿ��_�ţ����Ρ����x�����Mech-Vision��Mech-Vizʹ�ã��p�ɡ����ٲ����z�y/���y���á�
3D���I���C
��2�����I��2D���C
�ٽY���o�������ڼ���
�ߴ��29mm*29mm*29mm������USB3.0�����ӿڣ�5Gbps��Փ��ݔ������USB �ӿ�ֱ�ӹ�늣�֧��ܛ���|�l��Ӳ���|�l�������\�еȶ�Nģʽ��
���_���ԏ���������չ
����Windows��Linux����ϵ�y��֧��TWAIN��DirectShow�ӿڣ�SDK�_�l��֧��VC��VB��C#��Delphi��Labview���Z�ԣ�֧����Mech-Vision��Halcon��Labview��OpenCV��Matlab�ȵ�����ܛ����
2D���I���C
��3���D�λ�ҕ�X̎��ܛ��
��ȫ�D�λ���ҕ�Xܛ�����o�辎�����a������ɲ�⡢�o�����ϵ�ҕ�X���á�
����3Dҕ�X����ȌW����ǰ���㷨ģ�K���ɝM����s���ӵđ�������
�D�λ�ҕ�X̎��ܛ��
��4���C�������ܾ���ܛ��
��ȫ�D�λ��ęC�������ܾ��̭h����֧�֔��\����
����܉�EҎ������ײ�z�y����a�������㷨���m������ⱊ������Ʒ�ƙC���ˣ���ABB��KUKA��FANUC��DENSO��UR��AUBO��JAKA�ȡ�
�C�������ܾ���ܛ��
��5���C��ҕ�X��ȌW��ƽ�_ܛ��
����ȱ�ݙz�y����������ָ�ȹ��ܣ��Ɍ����w�����R�e����λ���Д����w��B�Լ��z�yȱ���㷨��
��ȌW������Ӗ�����ߣ�����ȌW��ģ��Ӗ���Ĕ����ɼ����Y�x�����롢��ע��ģ��Ӗ������C�������õ��^���M��ȫ�������ϣ�������������������Ӗ��Ч�ʣ���ȫ�̱��C������ȫ�ԡ�
�C��ҕ�X��ȌW����������
������Ӗ�Ŀ
ԓƽ�_���10������Ӗ�Ŀ��ܛӲ���YԴ���������̡���Ӗ�����ęn����Ӗҕ�l�ȡ�
�����Լ����a�⡢늙C�D�����ϡ�䓽���Ӌ���ȑ��È������������ν�B��
1�������a��
ԓ�Ŀģ�M���H���I�����ļ����a�⡣
��������&��������
�����a�������&������
2��늙C�D������
ԓ�Ŀģ�M���H���I������늙C�D�����ϡ�
��������&��������
늙C�D�����Ϲ�������&���È���
3��䓽���Ӌ��
ԓ�Ŀģ�M���H���I������䓽���Ӌ����
��������&��������
䓽���Ӌ����������&���È���
������Ӗ�n��
ƽ�_��֧�κ͘������n�̣����w��3Dҕ�X�����c���ü��ɡ�����AI+�C��ҕ�X���͑��ð������`���ȡ�
1����3Dҕ�X�����c���ü��ɡ���Ӗ�Ŀ
| �Ŀ1 ���b3Dҕ�Xϵ�y |
| �΄�1-1 �Cе���b |
| �΄�1-2 ���|���b |
| �΄�1-3 ܛ�����b |
| �Ŀ2 �ɼ�3D���C�ĈD�� |
| �΄�2-1 �B�����C |
| �΄�2-2 �������C���� |
| �΄�2-3 ���攵�� |
| �Ŀ3 �D���ע����ȌW��ģ��Ӗ�� |
| �΄�3-1 �½�DLK���� |
| �΄�3-2 �㷨ģ�K��B |
| �΄�3-3 ����D�� |
| �΄�3-4 ��������B |
| �΄�3-5 �D���ע��ģ��Ӗ�� |
| �΄�3-6 ģ����C��ģ�͑��� |
| �Ŀ4 ҕ�X���؟�� |
| �΄�4-1 ���؟�䛜ʂ� |
| �΄�4-2 ���؟�䛲��� |
| �΄�4-3 �����Ƅӿ��ƙC���� |
| �Ŀ5 ���C�Ⅲ�˶� |
| �΄�5-1 ���C�Ⅲ�˶����� |
| �΄�5-2 �˶�ǰ�ʂ� |
| �΄�5-3 ���ö����S�C�˶���λ�˷�ʽ��ETH�˶� |
| �΄�5-4 ���ö����S�C�˶���λ�˷�ʽ��EIH�˶� |
| �΄�5-5 ����TCP���c�|����ʽ��ETH�˶� |
| �΄�5-6 ����TCP���c�|����ʽ��EIH�˶� |
| �Ŀ6 �����c��ģ�������ץȡ�c |
| �΄�6-1 �c��ģ���ץȡ�c���� |
| �΄�6-2 �����c��ģ�� |
| �΄�6-3 ���c��ģ�� |
| �΄�6-4 ����ץȡ�c |
| �΄�6-5 �����c��ģ���ץȡ�c |
| �Ŀ7 �ҕ�X���� |
| �΄�7-1 Mech-Visionܛ���Ļ������� |
| �΄�7-2 ���ò��E��B |
| �΄�7-3 ���E�M�Ͻ�B |
| �΄�7-4 ���̌���——늙C�D�����ϵ�Mech-Vision���̴ |
| �Ŀ8 ��C���˹��� |
| �΄�8-1 Mech-Vizܛ���Ļ������� |
| �΄�8-2 �����΄ս�B |
| �΄�8-3 ���̌���——늙C�D�����ϵ�Mech-Viz���̴ |
| �Ŀ9 3Dҕ�X�M�A���� |
| �΄�9-1 �鿴3Dҕ�Xܛ���汾 |
| �΄�9-2 Mech-Vision���͑��ù��̽�B |
| �΄�9-3 Mech-Visionʾ�����̽�B |
| �΄�9-4 ���C��������Ʒ�ƙC����ͨӍ |
| �΄�9-5 �J�R�˜ʽӿ� |
| �΄�9-6 3Dҕ�X�S�C�փԲ�� |
| �Ŀ1 �Wǰ�ʂ� |
| �΄�1-1 �Ŀʽ�̌W���� |
| �΄�1-2 3Dҕ�X���͑��ù���վ���� |
| �΄�1-3 �W���YԴ���� |
| �΄�1-4 �����е��͑��ù���վ��ʹ��ע����� |
| �Ŀ2 2Dҕ�X���͑���——�㲿��ȱ�ݙz�y |
| �΄�2-1 �㲿��ȱ�ݙz�y����վ�Ĺ������� |
| �΄�2-2 �㲿��ȱ�ݙz�y����վ��ϵ�y���F���� |
| �΄�2-3 �㲿��ȱ�ݙz�y����վ��DLK���̌��F |
| �΄�2-4 �㲿��ȱ�ݙz�y����վ��ҕ�X���̌��F |
| �Ŀ3 2Dҕ�X���͑���——�㲿���ߴ�y�� |
| �΄�3-1 �㲿���ߴ�y������վ�Ĺ������� |
| �΄�3-2 �㲿���ߴ�y������վ��ϵ�y���F���� |
| �΄�3-3 �㲿���ߴ�y������վ��ҕ�X���̌��F |
| �Ŀ4 3Dҕ�X���͑���——�����a�� |
| �΄�4-1 �����a���վ�Ĺ������� |
| �΄�4-2 �����a���վ��ϵ�y���F���� |
| �΄�4-3 �����a���վ��ҕ�X���܌��F |
| �΄�4-4 �����a���վ���\��Ҏ�����܌��F |
| �΄�4-5 �����a���վ��ʹ��ע����� |
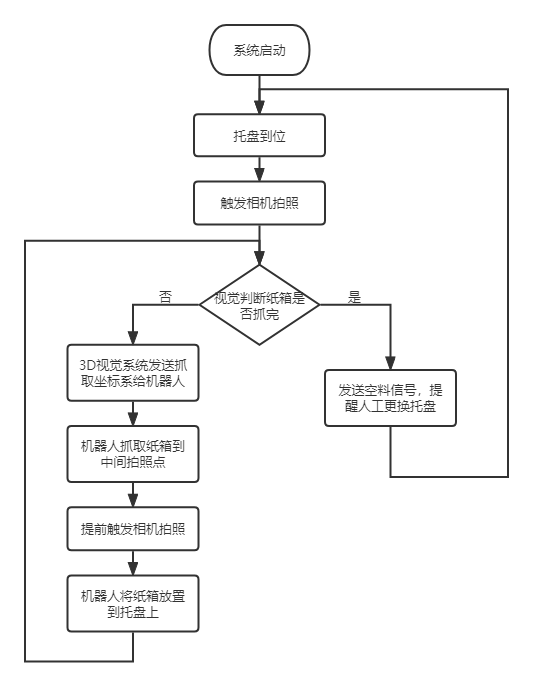
| �Ŀ5 3Dҕ�X���͑���——���������� |
| �΄�5-1 ���������Ϲ���վ�Ĺ������� |
| �΄�5-2 ���������Ϲ���վ��ϵ�y���F���� |
| �΄�5-3 ���������Ϲ���վ��ҕ�X���܌��F |
| �΄�5-4 ���������Ϲ���վ���\��Ҏ�����܌��F |
| �΄�5-5 ���������Ϲ���վ��ʹ��ע����� |
| �Ŀ6 3Dҕ�X���͑���——䓽���Ӌ�� |
| �΄�6-1 䓽���Ӌ������վ�Ĺ������� |
| �΄�6-2 䓽���Ӌ������վ��ϵ�y���F���� |
| �΄�6-3 䓽���Ӌ������վ��ҕ�X���܌��F |
| �΄�6-4 䓽���Ӌ������վ���\��Ҏ�����܌��F |
| �΄�6-5 䓽���Ӌ������վ��ʹ��ע����� |
| �Ŀ7 3Dҕ�X���͑���——�̳��֒� |
| �΄�7-1 �̳��֒�����վ�Ĺ������� |
| �΄�7-2 �̳��֒�����վ��ϵ�y���F���� |
| �΄�7-3 �̳��֒�����վ��ҕ�X���܌��F |
| �΄�7-4 �̳��֒�����վ���\��Ҏ�����܌��F |
| �΄�7-5 �̳��֒�����վ��ʹ��ע����� |
| �Ŀ8 3Dҕ�X���͑���——䓰��_�¿� |
| �΄�8-1 䓰��_�¿ڹ���վ�Ĺ������� |
| �΄�8-2 䓰��_�¿ڹ���վ��ϵ�y���F���� |
| �΄�8-3 䓰��_�¿ڹ���վ��ҕ�X���܌��F |
| �΄�8-4 䓰��_�¿ڹ���վ���\��Ҏ�����܌��F |
| �΄�8-5 䓰��_�¿ڹ���վ��ʹ��ע����� |