���I�C���˲��b�{ԇ��Ӗ�_�����I�C���ˌ�Ӗ�����_
2024-05-10 06:53�����I�C���˵IJ��b�{ԇ��һ���������s���^�̣��漰�������E�͌��I֪�R��
����һ�����b�^��
������ж�⚤�����I�C���˲��b��Ҫ�Ȳ�ж�⚤���⚤ʹ���ݽz�̶�����Ҫʹ�Ì��T�����M��ж�����ڲ�ж�^������Ҫ����С�ģ�����p�ęC���˃Ȳ����P�I������
������늣��ڲ�ж���I�C����ǰ��Ҫ�صה�늣��P�]�ⲿ�Դ�͙C�����Դ�_�P�������ж�r�·�����|���F���↖�}�����⣬��ж�^���й���ʹ��Ҳ��Ҫע�ⰲȫ�������|늵�Σ�U��r�İl����
������ж�·�壺�ڲ�ж���⚤���_����ȫ���֮����Ҫ��ж�·�塣�·���ϕ��кܶ��B������Ҫ��ж���@���^����Ҫʹ�Ì��I���ߺͼ��ܡ��ڲ�ж֮ǰ��Ҫ�����P�B����Ϣӛ䛺ã����ں��m�M�bʹ�á�
���������{ԇ�^��
����Ӳ���{ԇ�������½M�b�C���˺���Ҫ�M��Ӳ���{ԇ���@�����z����������Ƿ����_���b���_���·�����|�]�Гp�Ļ��·��ͬ�r����Ҫ�z��C���˵��Դ��늙C�Ƿ�����������
����ܛ���{ԇ��ܛ���{ԇ�ǹ��I�C�����{ԇ����Ҫ���֡���ܛ���{ԇ�^���У���Ҫ���C���˵Ŀ��Ƴ����M�Мyԇ���_���C�����܉����A���ij����M�й������@�����z��C���˵Ą����Ƿ�ʴ_���������Ƿ��܉����������ȡ�
���������{ԇ�������{ԇ�Ǵ_�����I�C�����܉�����A�����ܵ��P�I���E���ڹ����{ԇ�^���У���Ҫ���C���˵ĸ��N�����M�Мyԇ����ץȡ���a�⡢���\�ȡ�ͬ�r����Ҫ�{���C���˵ą��������ã��Դ_���C�����܉�M�㌍�H����
�������{ԇ�^���У���Ҫע�������c��
������ȫ��һ�����{ԇ�^���У���Ҫ�_�������ˆT�İ�ȫ���ڙC���˹����r����Ҫ�����ˆT�����C���˻���|�C���˵��\�Ӳ�����
�������{ԇ�����{ԇ�^���У���Ҫ���M���{ԇ����Ҫһ�����M���^��IJ������ġ��@�����ڼ��r�l�F�ͽ�Q���}��
����ӛ���Ϣ�����{ԇ�^���У���Ҫӛ����P����Ϣ�͔��������{ԇ���E���yԇ�Y���ȡ��@�����ں��m�ķ����ͽ�Q���}��
����һ�����b�^��
������ж�⚤�����I�C���˲��b��Ҫ�Ȳ�ж�⚤���⚤ʹ���ݽz�̶�����Ҫʹ�Ì��T�����M��ж�����ڲ�ж�^������Ҫ����С�ģ�����p�ęC���˃Ȳ����P�I������
������늣��ڲ�ж���I�C����ǰ��Ҫ�صה�늣��P�]�ⲿ�Դ�͙C�����Դ�_�P�������ж�r�·�����|���F���↖�}�����⣬��ж�^���й���ʹ��Ҳ��Ҫע�ⰲȫ�������|늵�Σ�U��r�İl����
������ж�·�壺�ڲ�ж���⚤���_����ȫ���֮����Ҫ��ж�·�塣�·���ϕ��кܶ��B������Ҫ��ж���@���^����Ҫʹ�Ì��I���ߺͼ��ܡ��ڲ�ж֮ǰ��Ҫ�����P�B����Ϣӛ䛺ã����ں��m�M�bʹ�á�
���������{ԇ�^��
����Ӳ���{ԇ�������½M�b�C���˺���Ҫ�M��Ӳ���{ԇ���@�����z����������Ƿ����_���b���_���·�����|�]�Гp�Ļ��·��ͬ�r����Ҫ�z��C���˵��Դ��늙C�Ƿ�����������
����ܛ���{ԇ��ܛ���{ԇ�ǹ��I�C�����{ԇ����Ҫ���֡���ܛ���{ԇ�^���У���Ҫ���C���˵Ŀ��Ƴ����M�Мyԇ���_���C�����܉����A���ij����M�й������@�����z��C���˵Ą����Ƿ�ʴ_���������Ƿ��܉����������ȡ�
���������{ԇ�������{ԇ�Ǵ_�����I�C�����܉�����A�����ܵ��P�I���E���ڹ����{ԇ�^���У���Ҫ���C���˵ĸ��N�����M�Мyԇ����ץȡ���a�⡢���\�ȡ�ͬ�r����Ҫ�{���C���˵ą��������ã��Դ_���C�����܉�M�㌍�H����
�������{ԇ�^���У���Ҫע�������c��
������ȫ��һ�����{ԇ�^���У���Ҫ�_�������ˆT�İ�ȫ���ڙC���˹����r����Ҫ�����ˆT�����C���˻���|�C���˵��\�Ӳ�����
�������{ԇ�����{ԇ�^���У���Ҫ���M���{ԇ����Ҫһ�����M���^��IJ������ġ��@�����ڼ��r�l�F�ͽ�Q���}��
����ӛ���Ϣ�����{ԇ�^���У���Ҫӛ����P����Ϣ�͔��������{ԇ���E���yԇ�Y���ȡ��@�����ں��m�ķ����ͽ�Q���}��
���I�C���˲��b�{ԇ��Ӗ�_
һ����������
���I�C���˲��b�{ԇ��Ӗ�_�x�����M��6�P���C���ˣ�����W�������I�C���˺��IJ����͙Cе�Y�����J֪ƽ�_���ăȲ���������I�C���˵��\�ӷ�ʽ�̈́������f�������ڙCе���P�W��ͨ�^�挍�O��������Փ֪�R�����ƙCе�OӋ���\�ӿ��Ƶ�֪�R�Y����
ͨ�^��6�P���C���˱��w�ĽM�b�c��⡢�b���c�{ԇ���W���Cе�ĵĹ���ԭ���c�{ԇ������ͨ�^�C���˘˶��c�y�����˽�C�������ԣ��ڌ��H�����г�ְl�]�C���˵����ܡ������W�����գ��C���˱��w�Y���������������ֱۡ�������Ϥ�C���p�����������C���p��������ԭ�����Y�������b�c�S�o�����C�����\���S�c����ϵ�������C������Ҫ���g�������C�����\���S�����Q���C��������ϵ�ķN��C�������ɶȣ����C���˻����g�Z�c�D�η�̖�������C���˻����g�Z���D�η�̖�����C�����{ԇ�������C������λ���C���˾��Ȝyԇ����
�ṩ���S���bܛ���W�����߷��潨ģ���挍��߀ԭ�C���˲��b���������Ұ������I�C���˙Cе�J֪��ԭ���J֪���Cе���b�c�{ԇ����Ҋ�����Ų飬���ϾS�Ⱦ��x���ݡ��W�T���Է��;������������ՙC���˲��b���ɡ�
 ��һ�����I�C���˲��b��Ӗ�_
��һ�����I�C���˲��b��Ӗ�_
�����_����������ʽ�OӋ�����w���Ã��|�X�ͲĴ���_����ù��I�X�Ͳ�ƴ�Ӳ���O��ײ�|���������ڷ��ÙC���˱��wɢ����
���b��Ӗ�_���g����
�����������ɶȹ��I�C����
���ģ��C���˱��w�����J֪
�ṩ�C���˱��w����������Ҏ����������C���˱��w�ߴ�D��늙CҎ������C���p�ٙCҎ����ȡ������J�R�C���˃Ȳ��Y��������C�����P���ĽY���M�ɣ���ͬ�P�����OӋ����˽���P�����C���p�ٙC�����c�������Լ����P��늙C���x��Ҫ��
���壩�C���˱��w���b�c�{ԇ
ͨ�^���w�IJ��b�c�{ԇ���ԌW���C���˽Y��ԭ�����b�䡢���a�F�����b���{ԇ�������Ų鼰�S�o�̌W�ȡ�
���w���Բ��b����ᔼ������ṩ���bɢ���Č���D������Ԕ����“���I�C���˱��w���b�փ�”��ȫ����ҕ�l�̳̣�Ԕ����B�����ֵęCе���b������^�̣��Լ�ע����� ��
�b��õęC���˱��w�����M��늚��{ԇ���{ԇ���P���İ��b�Ƿ����á������M���P����λ�˶����˶���ęC�����ṩ�^�ߵ�܉�E����
�������C�������S�OӋ�W��
�ṩȫ�ęC���˱��w�OӋ3D�Y�ϣ�����STEP��ʽ���W�����ԌW���C���˱��w�OӋ��Ҳ������ԭ����3D�ļ����A�ϣ����������M���ģ��_�l�Լ��ęC���˱��w�Y���������OӋ�ļ��ӹ��Ɍ��H�ęCе�����DIY�����b���Լ��ęC���˱��w��
�����C����У�ʜyԇģ�K
У�ʜyԇģ�K��Ҫ��ݔ��У��ģ�K��܉�E�˶�ģ�K�����w�}��ģ�K�M�ɡ��C���˱��w���b��ɺ��M�о��̡��{ԇ��У�ʹ��ܡ��ɸ����C���˳����M�Мyԇ���b�ı��w�Ƿ�ϸ�
��һ��ݔ��У��ģ�K

ݔ��У��ģ�K���Ͽ����M�І�һ�����ϻ��M�нM�����ϣ����ҿɌ������ٶȿ����M�п��ơ����b���ͲČ�Ӗ���ϣ����ڂ�ݔ�������������\���^���У��C���˿ɸ����\���ٶȡ��������Եȗl���M�й���ݔ�ͣ��w�F���I�C���˵�����̎���c���_λ�õĘ˶�����
l ݔ��У��ģ�K���g����
������܉�E�˶�ģ�K

���܉�E�˶��壬������Ҏ���ij������M��܉�E�z�
�˶�������X�Ͻ����ꖘO��ɰ������ʽ���죬�ߴ�250mm×150mm�����������Ρ�S�͡����Ρ��L���Ρ��A��܉�E��
���������w�}��ģ�K

ģ�K���w�����X�������b���ͲČ�Ӗ���ϣ��ɷ����b�䡢����ĽM�����O�÷���õĹ����ώ졣
�������b����܇
ÿ�����b�����_�^���O��һ���O�ؔz���^���Ɍ��W�����������b�^���M��ȫ�̔z䛣�����W���Ĕ����죬�yӋ�W���IJ����^���Ƿ����_���Ƿ�Ҏ����
ҕ�l�YԴ���S�r��ȡ�c��ȡ���M���n�̌W���YԴ�����ϣ���ɾ�Ʒ�n���Y��ȡ���Y������������F��Ч�����_���YԴ�졣
l Һ����Ļ���g����
��ȫ���o�ڲ��Ã��|�X�ͲĴ�����g���֞��Sɫ�W��
l ��ȫ���o�ڼ��g����
���I�C���˲��b�{ԇ��Ӗ�_�x�����M��6�P���C���ˣ�����W�������I�C���˺��IJ����͙Cе�Y�����J֪ƽ�_���ăȲ���������I�C���˵��\�ӷ�ʽ�̈́������f�������ڙCе���P�W��ͨ�^�挍�O��������Փ֪�R�����ƙCе�OӋ���\�ӿ��Ƶ�֪�R�Y����
ͨ�^��6�P���C���˱��w�ĽM�b�c��⡢�b���c�{ԇ���W���Cе�ĵĹ���ԭ���c�{ԇ������ͨ�^�C���˘˶��c�y�����˽�C�������ԣ��ڌ��H�����г�ְl�]�C���˵����ܡ������W�����գ��C���˱��w�Y���������������ֱۡ�������Ϥ�C���p�����������C���p��������ԭ�����Y�������b�c�S�o�����C�����\���S�c����ϵ�������C������Ҫ���g�������C�����\���S�����Q���C��������ϵ�ķN��C�������ɶȣ����C���˻����g�Z�c�D�η�̖�������C���˻����g�Z���D�η�̖�����C�����{ԇ�������C������λ���C���˾��Ȝyԇ����
�ṩ���S���bܛ���W�����߷��潨ģ���挍��߀ԭ�C���˲��b���������Ұ������I�C���˙Cе�J֪��ԭ���J֪���Cе���b�c�{ԇ����Ҋ�����Ų飬���ϾS�Ⱦ��x���ݡ��W�T���Է��;������������ՙC���˲��b���ɡ�
�����_����������ʽ�OӋ�����w���Ã��|�X�ͲĴ���_����ù��I�X�Ͳ�ƴ�Ӳ���O��ײ�|���������ڷ��ÙC���˱��wɢ����
���b��Ӗ�_���g����
| ��̖ | ���Q | Ҏ�� |
| 1. | ���γߴ� | 1200×500×800mm |
| 2. | �����г� | 800-1380mm |
| 3. | ����������ʽ | Һ������ |
| 4. | ���w���| | 6262+4040�X�Ͳ� |
| 5. | ������|��Ҏ�� |
���|�����I�X�Ͳ� �Y����ƴ�Ӟ�һ�����w���_���ϲ���T�Ͳۣ��������g����20mm������ʹ��M6���ٲ�ж��T����ĸ�͏�����ĸ�K |
| 6. | ��ײ�|���� | ����3mmܛ����PVC��ˮ���C������ϴ��������ײ�| |
| 1 | Ʒ����̖ | �����ɶȹ��I�C���� | |
| 2 | �p�ٙC | ���P���C����J1,J2,J3,J4,J5,J6�� | |
| 3 | �������ɶ� | 6 | |
| 4 | ���ؓ�d | 5kg | |
| 5 | �������� | 940mm | |
| 6 | �����m�� | 80mm/8-M5�������b�ݼy�� | |
| 7 | ��� | J1 | ±180° |
| 8 | J2 | -100°~+90° | |
| 9 | J3 | -80°~+95° | |
| 10 | J4 | ±180° | |
| 11 | J5 | ±120° | |
| 12 | J6 | ±360° | |
| 13 | ����\���ٶ� | J1 | 266°/s |
| 14 | J2 | 297°/s | |
| 15 | J3 | 300°/s | |
| 16 | J4 | 333°/s | |
| 17 | J5 | 500°/s | |
| 18 | J6 | 500°/s | |
| 19 | �؏Ͷ�λ���� | ±0.05mm | |
| 20 | ���w���� | 73kg | |
| 21 | �Դ늉� | 220V | |
| 22 | �ܺ� | 2.8KW | |
| 23 | ���b��ʽ | ���氲�b��֧�ܰ��b�����ð��b | |
| 24 | ���� | �b�䡢���ϰ��\����ȶѯB�� | |
| 25 | ���w���o�ȼ� | IP54 | |
| 26 | 늿ع���o�ȼ� | IP54 | |
�������C���˿�����
| 1 | Ʒ����̖ | �c�������ɹ��I�C�������� |
| 2 | ����ʾ���� | 8������|���� |
| 3 | ģ̖�ĽM�� | һ��ģ̖�а�����һ���������c 8 ���ӳ���ɸ������H��r�����M���x��ʹ�á� |
| 4 | ���a���xȡ��ʽ | “�}�_”��“CAN”��“RS485”���N�� |
| 5 | ԭ�cָ������ | ���O���S��ԭ�c�����C�ٶȡ� |
| 6 | ���lݔ�� | ݔ��늉�DC 24V |
| 7 | ͨӍ���� | �W�j����IP��ַ���x��ͨӍ��ʽ�� |
| 8 | ݔ���Դ | AC220V�Դ 50/60Hz |
| 9 | �ض� | <50�� |
| 10 | ����Ɍ�Ӗ | 늙C�����O�����Y�������O�����Ӿ��˿����нӾ�������|�Ӿ���늚ⲿ�ֲ��b��Ӗ���� |
�ṩ�C���˱��w����������Ҏ����������C���˱��w�ߴ�D��늙CҎ������C���p�ٙCҎ����ȡ������J�R�C���˃Ȳ��Y��������C�����P���ĽY���M�ɣ���ͬ�P�����OӋ����˽���P�����C���p�ٙC�����c�������Լ����P��늙C���x��Ҫ��
���壩�C���˱��w���b�c�{ԇ
ͨ�^���w�IJ��b�c�{ԇ���ԌW���C���˽Y��ԭ�����b�䡢���a�F�����b���{ԇ�������Ų鼰�S�o�̌W�ȡ�
���w���Բ��b����ᔼ������ṩ���bɢ���Č���D������Ԕ����“���I�C���˱��w���b�փ�”��ȫ����ҕ�l�̳̣�Ԕ����B�����ֵęCе���b������^�̣��Լ�ע����� ��
�b��õęC���˱��w�����M��늚��{ԇ���{ԇ���P���İ��b�Ƿ����á������M���P����λ�˶����˶���ęC�����ṩ�^�ߵ�܉�E����
�������C�������S�OӋ�W��
�ṩȫ�ęC���˱��w�OӋ3D�Y�ϣ�����STEP��ʽ���W�����ԌW���C���˱��w�OӋ��Ҳ������ԭ����3D�ļ����A�ϣ����������M���ģ��_�l�Լ��ęC���˱��w�Y���������OӋ�ļ��ӹ��Ɍ��H�ęCе�����DIY�����b���Լ��ęC���˱��w��
�����C����У�ʜyԇģ�K
У�ʜyԇģ�K��Ҫ��ݔ��У��ģ�K��܉�E�˶�ģ�K�����w�}��ģ�K�M�ɡ��C���˱��w���b��ɺ��M�о��̡��{ԇ��У�ʹ��ܡ��ɸ����C���˳����M�Мyԇ���b�ı��w�Ƿ�ϸ�
��һ��ݔ��У��ģ�K
ݔ��У��ģ�K���Ͽ����M�І�һ�����ϻ��M�нM�����ϣ����ҿɌ������ٶȿ����M�п��ơ����b���ͲČ�Ӗ���ϣ����ڂ�ݔ�������������\���^���У��C���˿ɸ����\���ٶȡ��������Եȗl���M�й���ݔ�ͣ��w�F���I�C���˵�����̎���c���_λ�õĘ˶�����
l ݔ��У��ģ�K���g����
| 1 | ģ�K�ߴ� | 600mm*80mm*160mm |
| 2 |
��늂����� ��3ֻ�� |
�l��Դ���t��� �z�y���x��0-300mm ����늉���12~24VDC ָʾ:360°LEDָʾ ݔ��ģʽ��NPN or PNP ���o�·���Դ���ӱ��o 푑��ٶȣ�0.5ms Max ���o�ȼ���IP66 |
���܉�E�˶��壬������Ҏ���ij������M��܉�E�z�
�˶�������X�Ͻ����ꖘO��ɰ������ʽ���죬�ߴ�250mm×150mm�����������Ρ�S�͡����Ρ��L���Ρ��A��܉�E��
���������w�}��ģ�K
ģ�K���w�����X�������b���ͲČ�Ӗ���ϣ��ɷ����b�䡢����ĽM�����O�÷���õĹ����ώ졣
| 1 | �}λ���� | 9����3��3�У� |
| 2 | �}��� | 2Kg |
| 3 | ���γߴ� | 162×183×363mm |
| 4 | ��λ�b�� | ÿ���}����Ψһ�Ķ�λ�b�� |
| 5 | �������| | ����������Ӽ��� |
| ��̖ | ���Q | Ԕ������ | ��λ | ���� | ��ע |
| 1 | �A��ʽŤ������ |
 Ʒ����̖��TG-25 Ť��������5-25N·m�� �ֱ��ʣ�0.25 N·m�� �L�ȣ�250mm�����ȣ�33mm��������0.34kg�� �ֱ���ꖘO�����X�Ͻ�����L���OӋ�������P����ɫ�� �̶ȣ������D�䣬��������ɫ�� ��݆�^���������p��� |
�� | 1 | |
| 2 | �����ǰ��� |
Ʒ����̖������ 0803 90��ֱ�Ǐ��۹�ˇ������λ��һ�γ��͏�����λ�o������ ���I��S2����w��죬���w��̎����Ӳ�ȸ�Ť�ش� ��ǽ��|�������������״�����ĥ�p�� ��ˮ�yԇ�����P�ָ����m�����wȥë��̎��������⻬ƽ���� ABS�ܚ������w�ι̣�����Ó�䣬�Ќ�����ף����דp�ģ� �����D���˹�ˇ��������Ҋ��ʹ�÷��㣻 ���x�����������������ݡ� |
�� | 1 | |
| 3 | �ٷֱ� |
Ʒ����̖���Ϲ� CV-6CA ���^������0-10mm���ֱ���0.01mm����Ȧ�⏽58mm�� �y���`���ʴ_�����S��ˮ�����m���p���x������Ȧ�L���OӋ���{�����P���D���p�ɿ�ݣ��~�w�~о�Y�����������ã���Ӳ�����R�w�����m�������x���������ɲ�ж��Ɯy�^����Ƕ�~���OӋ��������λ�b�ã����o���ݽz���x�������ʴ_�����펧�о��a��������Ҋ�� ���������Ա�����Ҏ��60kg���ߴ�58*50*56������1 kg����������588N ��λ�A���ף����m���^�ֵ����������ٓu�U�������o�ݽz�p�ɿ��Ʊ��P�����D���_�P�����������㣬����ϡ�����Ų��ϣ����������������˴ţ� |
�� | 1 | |
| 4 | ֱ�� |
Ʒ����̖������ 8461 Ҏ��50cm���L53cm����2.8cm�� ����2Cr13���P����죬�Թ����ã���ĥ��ˤ�������D����ֹ�ˇ�������ֲ��Ã�ɫӡˢ���pɫ��ӛ��������ĥ��������й�ʽ�Q��������ڲ��Һˌ������恆��̎�������^���á������⣻β�ˎ��Ғ�����ռ{�� |
�� | 1 | |
| 5 | ����ˮƽ�x |
 Ʒ����̖��Ŀ��ʿ MBS-8969 ���Ⲩ�L�����⾀��ˮƽ�����Ⲩ�L635nm ���c1*650nm�� �ԄӰ�ƽ��λ��±3°�������⾀�W���� �l��Ƕȣ�120°�� ˮƽ���ȣ�5m±1m�� ��ֱ���ȣ�5m±1m�� ���c���ȣ�±+1mm/1.5m�� �������ȣ�±+1mm/3m�� ������2mm/5m�� �����h�����҃�/���⣻ �Դ�������늳أ� ���I�⾀̎��оƬ���������s�h���Ĺ����ʶȣ� ��ʯ�������R�棬���ʏ���Ӳ�ȴ����ԏ��� �Cе�[�Nһ�w���� �������c���ԄӰ�ƽ�����ٿ�������������ˮ��ˤ��犱���360°�{��180°ˮƽ���D�Q��EP����|�����I�� |
�_ | 1 | |
| 6 | �ݽz�Q�o���ر� |
Ʒ����̖��MXITA MT0.3-30Nm Ť��������0.3-30N�����|���t�C�Ͻ�䓣���ʽ�����ƣ����ȣ�±2%����С�ֱ���0.1Nm(0.1lb-ft)��preset:1��ӛ��������50��Ť����λ��Nm lb-ft kg-m��mode:trace/peak��alert:led&buzzer��battery:2pcs*AAA���L�ȣ�75mm������120g�����C�Ԅ��P�C70s�� |
�_ | 1 | |
| 7 | ���D�� |
Ʒ����̖���ͷ� 315 �ߴ磺635*425*150�� PE���ϣ��Gɫ�h�����o���oζ�� ���m�����OӋ���������ã� �ɯB���OӋ�������ռ{�����õ����ÿ��g�������OӋ���ײ����üӺ�W���OӋ�����o��ײ��Ɠp�����з������ã��Ӻ���ֳ������������� |
ֻ | 1 |
�ġ��̌W��ʾ�����r�O�ؼm��ϵ�y
��ϵ�y���ô����@ʾ��ҕ�l�ɼ����ܡ�ͨ�^�����b��Ӗ�_���뵽��ߴ�Һ���@ʾϵ�y�У��Ɍ��F������Ҫ�M�в��bҕ�l�^�������b����ܛ�����E�����ȡ�ÿ�����b�����_�^���O��һ���O�ؔz���^���Ɍ��W�����������b�^���M��ȫ�̔z䛣�����W���Ĕ����죬�yӋ�W���IJ����^���Ƿ����_���Ƿ�Ҏ����
ҕ�l�YԴ���S�r��ȡ�c��ȡ���M���n�̌W���YԴ�����ϣ���ɾ�Ʒ�n���Y��ȡ���Y������������F��Ч�����_���YԴ�졣
l Һ����Ļ���g����
| 1 | ���bλ�� | ������1.6�ף��������w���W�Y���OӋ���M��W������ҕ���^�� |
| 2 | ���b֧�� | �����ͲĽY�������w�OӋ���M���^��ҕ�����������b�ι̲��΄ӡ� |
| 3 | ��Ļ | 55�� 4K �������� |
| 4 | �ֱ��� | 3840*2160 |
| 5 | NTSC | 72% |
| 6 | ��ҕ�Ƕ� | 178° |
| 7 | ˢ���� | 60Hz |
| 8 | CPU | Cortex A53 �ĺ� ���_1.5GHz |
| 9 | GPU | Mali-450 750MHz |
| 10 | HDR | HDR 10 �� HLG(Hybrid Log-Gamma) |
| 11 | �ȴ� | 2GB DDR |
| 12 | �W�� | 8GB eMMC |
| 13 | ͨӍ���� | ֧���{�����t�⣬�o��wifi �p�l 2.4/5GHz |
| 14 | �ӿ� | HDMI����˿�2����USB�ӿ�2�������l�ӿڡ���̫�W��AV��ģ�M��̖�Ƚӿ� |
| 15 | ��ʽ֧�� | ֧�ָ��Ҏҕ�l�����l��ʽ�� |
l �O�ؔz���^���g����
| 1 | Ʒ�� | ������ҕ |
| 2 | ��̖ | DS-2DC2402IW |
| 3 | �Դ | DC12V 9W max |
| 4 | �����ضȺ͝�� |
-10��-50�� �����90% |
| 5 | ���o�ȼ� |
TVS 4000V���ס�����ӿ����ͻ�� ����GB/T17626.5�ļ��˜� |
| 6 | ���b��ʽ | ��N���b��ʽ�ɸ������íh���M���x�� |
| 7 | �۽�ģʽ | �Ԅ� |
| 8 | ����� | ����52dB |
| 9 | ���� | 2.8-6mm��2����W׃�� |
| 10 | ��Ȧ�� | F1.8-F2.5 |
| 11 | ���� |
ˮƽ������360�ȱO�؟o���� ��ֱ������0-90�� ֧�ֱ���׃�� 300���A���c Ѳ������8�l ֧�֔��ӛ������ �������ܣ��A���c/Ѳ������ |
| 12 | �t��� |
�t��������x��30m ֧��Smart IR |
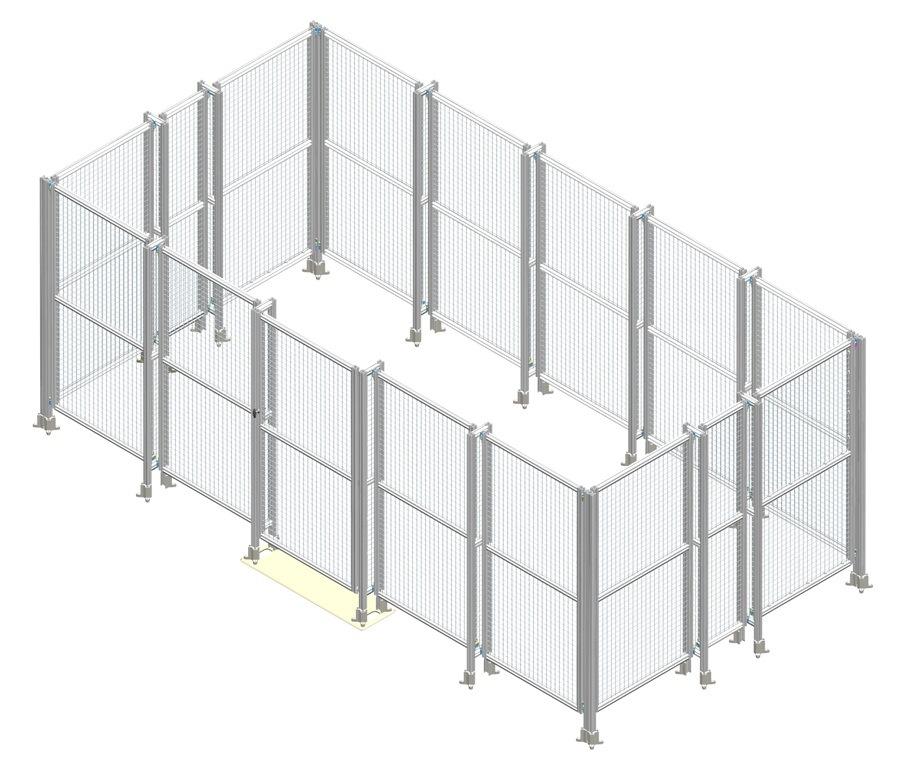
�塢��ȫ����
���D
���b��Ӗ�^�O�ð�ȫ���o�ڣ��������^���c��ȫ�^����Ч���x�������^��ȸ�����վ֮�gҲ�����x�_��������ڞ��Tʽ�Y�������ð�ȫ�i��Σ�U�^���O�ù��I����ȫ��Ļ���������o������ȫ����ȫ���o�ڲ��Ã��|�X�ͲĴ�����g���֞��Sɫ�W��
l ��ȫ���o�ڼ��g����
| 1 | �߶� | 1.3�� |
| 2 | ���| | ��ܞ郞�|���I�X�Ͳģ����g�W��郞�|������䓽z |
| 3 | �W��z�� | 4.0mm |
| 4 | �W��ߴ� | 60mm*60mm |