�o��܇ƽ�_���o���{�����С܇
2024-05-24 07:11 ���ܟo���{�С܇�Ǯ�(d��ng)��Ƽ��I(l��ng)���һ���Ҫ��(chu��ng)�£������I(l��ng)����܇�ИI(y��)��δ���l(f��)չ���S���˹����ܺ�֪���g(sh��)�IJ����M(j��n)�����o���{�С܇����u�Ŀƻ��Ӱ������F(xi��n)������@һ���d���g(sh��)���ص�׃�҂������з�ʽ���J(r��n)֪�����o�҂����������ı�����
�o���{���܇��������܇��һ�N��Ҳ�Q��݆ʽ�ƄәC(j��)���ˣ���Ҫ����܇��(n��i)����Ӌ��C(j��)ϵ�y(t��ng)�����������{�x�팍�F(xi��n)�o���{��Ŀ�ġ����ܟo���{�С܇��һ���Ϻ�픰�����O(sh��)����������˾�������ܾW(w��ng)(li��n)�����_�l(f��)�M(j��n)�Ѓ�(y��u)����݆ʽ�C(j��)���ˣ��m����Ѳ�z�������{�f(xi��)ͬ���ơ�Ӌ��C(j��)ҕ�X����ȌW(xu��)��(x��)�ȼ��g(sh��)���о��c��(y��ng)�á�
���ܟo���{�С܇��һ���҃�(n��i)���I(y��)�ęC(j��)�����ƄӵױP�����Џ�(qi��ng)ͨ�^����ؓ(f��)�d���߾��ȡ��ߔU(ku��)չ����������m(x��)���L�����c���ɿ�ƽ�_�_�l(f��)��֧�ֶ�N��(y��ng)�È��������ܟo���{�С܇������݆�߾��Ȳ��ٵױP���Ϸ����dMini��X��ǰ��ξ��������_(d��)��������C(j��)���Ȃ�������ͬ�r�A(y��)��4������usb�ڼ�һ���W(w��ng)�ڣ����ԔU(ku��)չ����V���t�����C(j��)���C(j��)е�۵ȡ�
���ܟo���{�С܇ܛ�����õ���ubuntu18.04��ҕ��ϵ�y(t��ng)����ROS�C(j��)���˿�ܣ��ѽ�(j��ng)�A(y��)���m��cartographer2D���D��(d��o)����location_fusion��λ�ںϣ�teb_local_planner·��Ҏ(gu��)���ȹ��ܰ������Ԍ��F(xi��n)�Ԅ��{���ϵȹ��ܡ�����ȫ�ׂ���������(d��o)��ܛ�����S���Ľ̳̼��Y�ϣ����aȫ���_Դ���O�����Ñ���ʹ���T�����Ñ��ɿ������W(xu��)��(x��)������_�l(f��)��ܛ�����m(x��)���M(f��i)���£�Ҳ���Ñ��ṩ���õ�ʹ���w
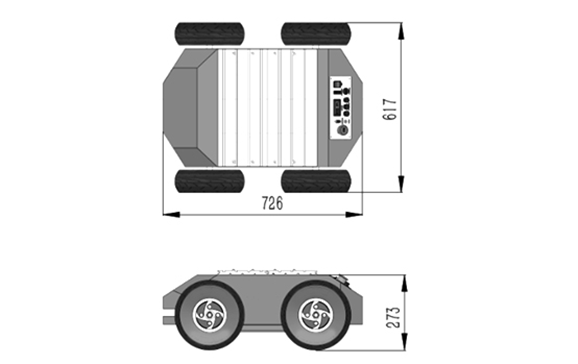

DB-WR01 ���ܟo���{�С܇

�o���{���܇��������܇��һ�N��Ҳ�Q��݆ʽ�ƄәC(j��)���ˣ���Ҫ����܇��(n��i)����Ӌ��C(j��)ϵ�y(t��ng)�����������{�x�팍�F(xi��n)�o���{��Ŀ�ġ����ܟo���{�С܇��һ���Ϻ�픰�����O(sh��)����������˾�������ܾW(w��ng)(li��n)�����_�l(f��)�M(j��n)�Ѓ�(y��u)����݆ʽ�C(j��)���ˣ��m����Ѳ�z�������{�f(xi��)ͬ���ơ�Ӌ��C(j��)ҕ�X����ȌW(xu��)��(x��)�ȼ��g(sh��)���о��c��(y��ng)�á�
���ܟo���{�С܇��һ���҃�(n��i)���I(y��)�ęC(j��)�����ƄӵױP�����Џ�(qi��ng)ͨ�^����ؓ(f��)�d���߾��ȡ��ߔU(ku��)չ����������m(x��)���L�����c���ɿ�ƽ�_�_�l(f��)��֧�ֶ�N��(y��ng)�È��������ܟo���{�С܇������݆�߾��Ȳ��ٵױP���Ϸ����dMini��X��ǰ��ξ��������_(d��)��������C(j��)���Ȃ�������ͬ�r�A(y��)��4������usb�ڼ�һ���W(w��ng)�ڣ����ԔU(ku��)չ����V���t�����C(j��)���C(j��)е�۵ȡ�
���ܟo���{�С܇ܛ�����õ���ubuntu18.04��ҕ��ϵ�y(t��ng)����ROS�C(j��)���˿�ܣ��ѽ�(j��ng)�A(y��)���m��cartographer2D���D��(d��o)����location_fusion��λ�ںϣ�teb_local_planner·��Ҏ(gu��)���ȹ��ܰ������Ԍ��F(xi��n)�Ԅ��{���ϵȹ��ܡ�����ȫ�ׂ���������(d��o)��ܛ�����S���Ľ̳̼��Y�ϣ����aȫ���_Դ���O�����Ñ���ʹ���T�����Ñ��ɿ������W(xu��)��(x��)������_�l(f��)��ܛ�����m(x��)���M(f��i)���£�Ҳ���Ñ��ṩ���õ�ʹ���w
�a(ch��n)Ʒ����(sh��)
| �o��܇ƽ�_ |
�ߴ� 726*617*273mm ݆�� 535mm �S�� 386mm ���� 40kg ؓ(f��)�d 50kg 늙C(j��)��(sh��)�� 2�� 늳� 24v �����F�늳� 늳����� 20Ah �m(x��)���r�g 4h �o���Դ 24v ����ٶ� 0.8m/s �(q��)�ӷ�ʽ ���(q��) �D(zhu��n)��ʽ �����D(zhu��n)�� ��ֱԽ������ 8cm �������� 25° |
| ���ؙC(j��) |
���� 100TOPS GPU 32��Tensor����1024�� CPU 8��Arm Cortex-A78 2GHz ��(n��i)�� 16GB 128λLPDDR5 102.4GB/s �惦 512GB ҕ�l����a H.265 PCIe 1X4+3X1 PCIe4.0 �@ʾ�ӿ� HDMI2. 1 1x8K30DP �W(w��ng)�� ��(n��i)�� I/O USB3.0/SCI/I2C/CAN/DMIC/ DSPK/I2S/GPIOs |
| �@ʾ�� |
�ߴ� 13.3 Ӣ�� ���� 16: 9 �ֱ��� 1920*1080 ���� 300 cd/m² ���ȶ� 800: 1 �|�� �� |
| �ྀ���_(d��) |
����(sh��) 16 ���Ⲩ�L 905nm ���ⰲȫ�ȼ� Class 1 ���۰�ȫ �y������ 150m(90m@10% NIST) ä�^(q��) ≤0.2m ���ȣ�����ֵ�� ±2cm(1m to 100m) ±3cm(0.1m to 1m) ±3cm(100m to 150m) ˮƽҕ���� 360° ��ֱҕ���� 30°��-15°~��15°) ˮƽ�Ƿֱ��� 0.2°/0.4° ��ֱ�Ƿֱ��� ���� 2° ���� 10Hz/20 Hz �D(zhu��n)�� 600/1200rpm (10/20Hz) ���c��(sh��) ~288,000pts/s(�λز�) ~576,000pts/s(�p�ز�) UDP��(sh��)��(j��)����(n��i)�� ���S���g����(bi��o) ���䏊(qi��ng)�� �r�g���� ݔ����(sh��)��(j��)�f(xi��)�h UDP packets over Ethernet �r�gͬ�� ≈ GPRMC with 1PPS��PTP&gPTP |
| �l(w��i)�ǽ��ՙC(j��) |
ͨ�� 1408 ͨ�� �l�c 5�Ƕ��l BDS��GPS��QZSS��GLONASS��Galileo ���c��λ (RMS) ƽ�� 1.5m �߳� 2.5m RTK(RMS) ƽ�� 0.8cm+1ppm ���߳� 1.5cm+1ppm �䆢�� <30s RTK ��ʼ���r�g <5s( ����ֵ ) ��ʼ���ɿ��� >99.9% ���ͨӍ��ʽ ��DTUģ�K ���?j��n)?sh��)��(j��) RTCM 3.X ��(sh��)��(j��)��ʽ NMEA 0183 Unicore ��λ�y��(sh��)��(j��)������ 20Hz ԭʼ�^�y����(sh��)��(j��)������ 20Hz ���� (RMS) 0.1° /1m ���� �r�g���� (RMS) 20ns �ٶȾ��� (RMS) 0.03m/s �p�쾀�ӿ� SMA���^���݃�(n��i)�� * 2 ͨӍ�ӿ� USB-Type-C ��늽ӿ� USB-Type-C/XT-30 ���늉� 5-15V ���� 2.4W �ߴ� 93mmx69mmx37mm ���� 153g |
| �T�Ԍ�(d��o)��ϵ�y(t��ng) | ��λ�ǜy��������±180°�������c�ŷ�λ���x�����y������(RMS)@25�棺<1.5°(�o�Ÿɔ_�l����)���ֱ��ʣ�<0.1° ���A�ǜy��������±500°/sec���y������(RMS)@25�棺<±0.5 °(�ӑB(t��i))��<±0.2 °(�o�B(t��i))���ֱ��ʣ�<0.1° �����݃x�y��������±180°�������c�ŷ�λ���x�������cƫ�(w��n)����@25�棺<200 °/hr���ֱ��ʣ�<0.1°/sec��������>100Hz �����ٶ�Ӌ�y��������±8G���ֱ��ʣ�<10mg��������>100Hz ���ň�Ӌ�y��������±8gauss���ֱ��ʣ�<2.5mgauss��������14-17Hz |
| �������C(j��) | �ֱ��ʎ��� 1920X1080, 30fps |
| �pĿ���C(j��) |
ҕ�lݔ����>2.2K@15fps,>1080p@30fps;>720p@60fps, ҕҰ��>90°(H)x60°(V)x100°(D) RGB��������ͣ�>1/3”4MP CMOS; ���ࣺ>2 . 8mm; �ӿڣ�USB 3.0�˿ڣ� ��ȷ�����0.5-20m; ��Ⱦ��ȣ� <2%up to 3m;≤4%up to 15m; |
| ܛ������ |
���ܣ� �I�P/�ֱ����ƙC(j��)�����\(y��n)�ӣ� Cartographer2D/3D-SLAM���D/��λ���� Navigation��(d��o)������ TEB�C(j��)���˾ֲ�·��Ҏ(gu��)������ ȫ��·��Ҏ(gu��)������ ���c·����(d��o)������ RTK��λ�ں��㷨���� GPSѭ�E·����(d��o)������ Simulation����ģ�M�� |