��� > ��I(y��)���� > ��Ʒ���] > ���S���g�C(j��)��(g��u)��(chu��ng)��ƴ�b��(sh��)�(y��n)�_(t��i)�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)
���S���g�C(j��)��(g��u)��(chu��ng)��ƴ�b��(sh��)�(y��n)�_(t��i)�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)
2024-12-08 08:34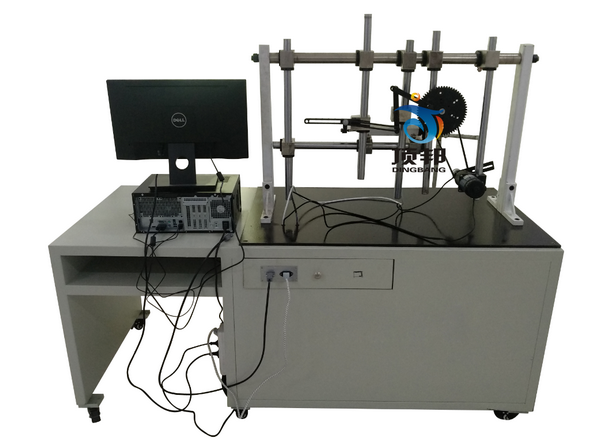

DB-LG08���S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)�����r(sh��)�ڸ�У�̌W(xu��)�ĸ��Ҫ��ȡ�������B(y��ng)�W(xu��)���Ą�(chu��ng)�¾���ᘌ�Ŀǰ���(sh��)�(y��n)�b�þ�����ƽ��C(j��)��(g��u)�ĬF(xi��n)����Ƴ��Ɍ�(sh��)�F(xi��n)��N���g���S�C(j��)��(g��u)�Č�(sh��)�(y��n)�_(t��i)�������ڏ�(qi��ng)��Ӳ�����A(ch��)�ϵ�ܛ��Ҳ�DZ���(sh��)�(y��n)�_(t��i)��һ�����c(di��n)��ܛ�����H���M(j��n)�ЬF(xi��n)����(sh��)�(y��n)�Ĝyԇ��߀�ṩ��һ��(g��)���M(j��n)�����S̓�M����ƽ�_(t��i)�������� 21 ���o(j��)���B(y��ng)����������(chu��ng)�������Č�(sh��)���˲š�ȫ����ߌW(xu��)����(sh��)�`�̈́�(d��ng)����������ь�(sh��)�(y��n)ƽ�_(t��i)��
һ����(sh��)�(y��n)��(n��i)�ݣ�
1���C(j��)еԭ���n���O(sh��)Ӌ(j��)��
2�����g��ƽ��C(j��)��(g��u)�M�τ�(chu��ng)��(sh��)�(y��n)��
3���C(j��)��(g��u)�M��ԭ��ƴ�b��(sh��)�(y��n)��
4���M�ϙC(j��)��(g��u)���\(y��n)��(d��ng)������(sh��)�(y��n)��
5���q��ėU�C(j��)��(g��u)�Ļ�����ʽ�����Ԍ�(sh��)�(y��n)��
6���q��ėU�C(j��)��(g��u)���ݻ���(sh��)�(y��n)��
7����(sh��)�`�Խ̌W(xu��)�h(hu��n)��(ji��)�Ђ���(d��ng)ϵ�y(t��ng)������ƴ�b��(sh��)�(y��n)��
8���C(j��)��(g��u)�\(y��n)��(d��ng)�ą���(sh��)�y����(sh��)�(y��n)��
9�����䌍(sh��)�(y��n)
�������ܼ����c(di��n)��
1�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)�܌�(sh��)�F(xi��n)��N���g���S�C(j��)��(g��u)�Ĵ,�����ṩ���S̓�M����ƽ�_(t��i),ģ�M�C(j��)��(g��u)���\(y��n)��(d��ng)��B(t��i)��
2�����W(xu��)���ںϡ�һ�C(j��)���ã�����(sh��)�(y��n)�_(t��i)�ṩ�˶�Nƽ�漰���g�C(j��)��(g��u)�ĽM�ϣ��������õ�Ӳ����ܛ����֧�֣���������һ��(g��)�C(j��)늾C�ό�(sh��)�(y��n)�_(t��i)�W(xu��)�������W(xu��)�Ƶ��ں���һ��(g��)��ֱ�^���J(r��n)�R(sh��)��
3�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)�Č�(sh��)�(y��n)�����Rȫ����(sh��)�(y��n)�_(t��i)�����S�C(j��)�ܡ����K��늙C(j��)�����U�M���߸��U�M���X݆��݆����݆����݆��݆�U���f��(li��n)�S��(ji��)��朂���(d��ng)��������(d��ng)�M�ɣ���ƴ�b����ƽ�漰���g�C(j��)��(g��u)�ڃ�(n��i)�Ķ��_(d��) 40 �N���ϵĽM�ό�(sh��)�(y��n)������
4�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)�F(xi��n)����(sh��)�(y��n)�c̓�M��(sh��)�(y��n)��Y(ji��)�ϣ�̓�Mƽ�_(t��i)�ṩ��15�N�\(y��n)��(d��ng)����������ȫ��(sh��)�F(xi��n)̓�M�b���ģ�M�挍(sh��)�\(y��n)��(d��ng)���Y(ji��)��̓�M�������M(j��n)�ЬF(xi��n)���b��̈́�(chu��ng)�·����O(sh��)Ӌ(j��)��
5�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)���ܷ�(w��n)������(sh��)�(y��n)�_(t��i)���ø߶˵Ć�Ƭ�C(j��)�yԇϵ�y(t��ng)���Y(ji��)�Ͼ��ܵĹ�Ž�λ�Ƃ��������Դ���ͨӍ��(sh��)�r(sh��)�ɼ�ԭ��(d��ng)�������g�C(j��)��(g��u)�͈�(zh��)�И�(g��u)����λ�ơ��ٶȡ����ٶȣ��y�����_����(w��n)����
6�����S�C(j��)��(g��u)��(chu��ng)�¾C�ό�(sh��)�(y��n)�_(t��i)ϵ�л���ͨ�û���ģ�K�����������ϵ�л���ͨ�û������O(sh��)Ӌ(j��)���b�了�ף�����ģ�K���O(sh��)Ӌ(j��)�������Ռ�(sh��)�H��Ҫ���ӻ�p��ģ�K��
����ܛ���f����ԓܛ���Ƀɲ��֣�һ���֞�ƴ�b�����ķ���ܛ�������������
1����(sh��)�(y��n)�_(t��i)�����㲿�������S��(sh��)�w�D��
2��12�N�\(y��n)��(d��ng)��ƴ�b������
3��14�N���̙C(j��)еԭ��ƴ�b������
4��21�Nƽ��C(j��)��(g��u)�\(y��n)��(d��ng)�����(d��ng)����
5��9�N���S�C(j��)��(g��u)�\(y��n)��(d��ng)�����(d��ng)����
6����ж�ֽ��^�̱�ը��ʾ��
��һ���֞�C(j��)��(g��u)�\(y��n)��(d��ng)���桢�C(j��)��(g��u)�O(sh��)Ӌ(j��)���桢��(sh��)��(j��)�ɼ����漰��(sh��)�H��(sh��)��(j��)�ɼ�ϵ�y(t��ng)���������ƽ��C(j��)��(g��u)��݆�C(j��)��(g��u)���gЪ�C(j��)��(g��u)�������Ӌ(j��)12�N���͙C(j��)��(g��u)�\(y��n)��(d��ng)�������O(sh��)Ӌ(j��)�����档��ԓ���W(xu��)���ȿ������O(sh��)Ӌ(j��)���ĸ��N�C(j��)��(g��u)�е������㲿������(sh��)���M(j��n)���^�����\(y��n)��(d��ng)��r��ģ�M�ɼ��\(y��n)��(d��ng)�����ȡ��ֿ������Ì�(sh��)�(y��n)�_(t��i)��ӳɌ�(sh��)�H�ęC(j��)��(g��u)�\(y��n)��(d��ng)���������������Č�(sh��)�H�\(y��n)��(d��ng)��r�M(j��n)�Д�(sh��)��(j��)�ɼ������^�����B(t��i)�c��(sh��)�H��r���\(y��n)�в��ʹ�W(xu��)��������̵��������W(xu��)��֪�R(sh��)��
�ġ���Ҫ���g(sh��)����(sh��)��
ÿ��(sh��)�(y��n)�_(t��i)����1�_(t��i)�C(j��)�ܣ�1�������һ��ܛ����
�(q��)��(d��ng)ֱ���p��늙C(j��)N=70W��220v,ݔ���D(zhu��n)��n=0��80 r/min,1�_(t��i)/�ף�
��Ž�λ�Ƃ�����ݔ��늉�/�}�_��(sh��) 5V/1000P 1��(g��)/�ף�5V/360P 1��(g��)/�ף�
�����������й�ͬ�N�Ҏ(gu��)�����������߷օ^(q��)�[�ţ�����ȡ�ã�1��(g��)/�ף�
���ͳߴ磺1400×800×1620mm��
������150kg��
���h��(sh��)�(y��n)�_(t��i)ʹ���˔�(sh��)��2-4��/�M��