�ŷ��(q��)�ӿ���ϵ�y(t��ng)�����M(j��n)�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_
2024-10-21 08:57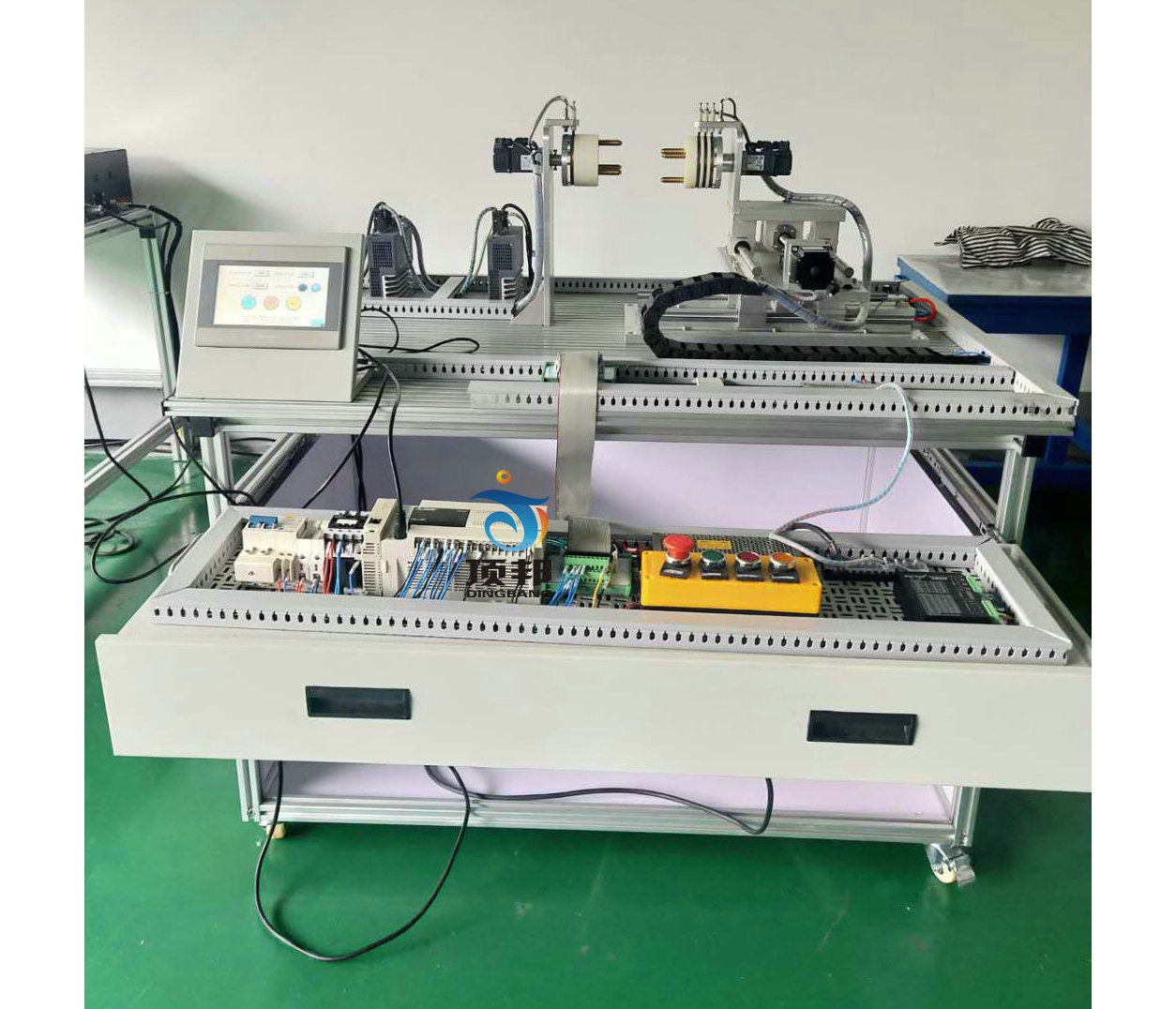
PLC���M(j��n)�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_���������S��λģ�͡�PLC�����M(j��n)�\(y��n)�ӿ���ϵ�y(t��ng)���ŷ��\(y��n)�ӿ���ϵ�y(t��ng)���˙C(j��)���桢�������ȼ��g(sh��)��һ�w�Č�(sh��)Ӗ(x��n)�̌W(xu��)�b�ã��m�ϙC(j��)�һ�w����늚� ���̡��Ԅӻ��Ȍ��I(y��)��(sh��)Ӗ(x��n)�̌W(xu��)���n���O(sh��)Ӌ(j��)�����I(y��)�O(sh��)Ӌ(j��)��
�������M(j��n)�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_��(sh��)Ӗ(x��n)�(xi��ng)Ŀ
�΄�(w��)һ�����M(j��n)늙C(j��)���(q��)������ʹ��
1.���M(j��n)늙C(j��)���(q��)�������x��
2.���M(j��n)늙C(j��)���(q��)�������ƻ�·�ĽӾ�
3.���M(j��n)늙C(j��)�(q��)�������O(sh��)��
4.PLC ���Ʋ��M(j��n)늙C(j��)�ij���
5.���M(j��n)늙C(j��)�\(y��n)���c�{(di��o)ԇ
�΄�(w��)�����ŷ�늙C(j��)���(q��)������ʹ��
1.�ŷ�늙C(j��)�(q��)�������ŷ�늙C(j��)���x��
2.�ŷ�늙C(j��)�(q��)�������ŷ�늙C(j��)�ĽӾ�
3.�ŷ�늙C(j��)�(q��)��������(sh��)�O(sh��)��
4.ͨ�^�����������ŷ�늙C(j��)���\(y��n)��
5.ʹ���ŷ�ܛ�������ŷ�늙C(j��)���\(y��n)��
�΄�(w��)�����|������ʹ��
1.�|�������b
2.�|��������·�B��
3.�|�����M�B(t��i)��������
4.�|�����c PLC ͨ�Ņ���(sh��)�O(sh��)��
�΄�(w��)�ģ�늚�����·�İ��b�� PLC ����
1.PLC���M(j��n)늙C(j��)�(q��)�������ŷ�늙C(j��)�(q��)����늚��·�B��
2.PLC���M(j��n)늙C(j��)�(q��)�����Ķ�λ���Ƴ���
3.PLC�ŷ�늙C(j��)�(q��)�����Ŀ��Ƴ���
4.���� PLC �IJ��M(j��n)늙C(j��)���S���D(zhu��n)���Ƴ���
5.���ڲ��M(j��n)늙C(j��)�^��λ��ϵ�y(t��ng)�����S��λ���Ƴ���
6.�����|�������ƶ��S����ͬ���\(y��n)�D(zhu��n)����
�΄�(w��)�壺ϵ�y(t��ng)�{(di��o)ԇ�c�\(y��n)��
����PlC�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_���g(sh��)����
1.ݔ���Դ������������220V±10% 50Hz
2.�����h(hu��n)�����ض�-10�桫+40��������ȣ�85%��25�棩 ���Σ�4000m
3.�b����������1.0kVA
4.���C(j��)�ߴ磺1200mm×800mm×1100mm
�ġ�ϵ�y(t��ng)�M�ɼ�����
1.�C(j��)��(g��u)���֣�������(sh��)Ӗ(x��n)�������I(y��)�X�Ͳġ���ϡ����S���D(zhu��n)ģ�ͣ������ܝL��z�U�����Sͬ���C(j��)��(g��u)���z�y����������λ�_�P(gu��n)���ȽM�ɡ�
2.PLC ���C(j��)��CPU1214DC/DC/DC+SB1222(��(n��i)��14·��(sh��)����ݔ��/10·��(sh��)����ݔ��)ݔ����·�����}�_�ɿ��Ʋ��M(j��n)�C(j��)�(q��)�������ŷ�늙C(j��)�(q��)����
3.���M(j��n)ϵ�y(t��ng)��һ������ˮƽ�S�(q��)�ӡ�
4.�ŷ�ϵ�y(t��ng)���ŷ�ϵ�y(t��ng)���ף��������Sͬ���\(y��n)���(q��)�ӡ�
5.�˙C(j��)���棺���� 64K ɫ 7���ɫ���I(y��)�|������
6.����S���D(zhu��n)ģ��
�塢PlC�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_��Ҫ����
| PlC�ŷ����ƾC�ό�(sh��)Ӗ(x��n)ƽ�_ | ||||
| ���Q | ��̖ | ��(sh��)�� | �r(ji��) | ��ע |
| ��(sh��)Ӗ(x��n)�_ | 1 | �_ | ||
| PLC | CPU1214DC/DC/DC+SB1222 | 1 | �_ | |
| �|���� | ����̩ͨ7�� | 1 | �_ | |
| ���M(j��n)늙C(j��)���(q��)���� | 2 | �� | ||
| �ŷ�늙C(j��)���(q��)���� | 2 | �� | ||
| �z�܌�(d��o)܉ | 2 | �� | ||
| ������ | 8 | �� | ||
| ��ȫ�往 | ���� | �� | ||
| ��ȫ�往 | ���� | �� | ||
| ��(sh��)�(y��n)ָ��(d��o)�� | 1 | �� | ||
| ������| | 1 | �� | ||
| ����ܛ�� | 1 | �� | ||
| ����ܛ�� | 1 | �� | ||