
PLC��(sh��)Ӗ(x��n)�_�ɾ��̿������ĸ���
�ɾ������������Ӣ�ķQProgrammable Logical Controller�����QPLC������һ��(g��)��̎��������ĵĔ�(sh��)���\(y��n)����������ϵ�y(t��ng)�b�ã������ڹ��I(y��)�F(xi��n)����(y��ng)�ö��O(sh��)Ӌ(j��)�������ÿɾ�����Ĵ惦(ch��)�������������(n��i)���惦(ch��)��(zh��)��߉�\(y��n)�㡢�����ơ����r(sh��)/Ӌ(j��)��(sh��)�����g(sh��)�\(y��n)��Ȳ���ָ���ͨ�^��(sh��)��ʽ��ģ�Mʽ��ݔ�롢ݔ���ӿڣ����Ƹ��N��͵ęC(j��)е�����a(ch��n)�^�̡�PLC���C(j��)���g(sh��)�c���y(t��ng)���^늽��|���Ƽ��g(sh��)��Y(ji��)�ϵĮa(ch��n)����˷����^늽��|����ϵ�y(t��ng)�еęC(j��)е�|�c(di��n)�ď�(f��)�s�Ӿ����ɿ��Ե͡����ĸߡ�ͨ���Ժ��`���Բ��ȱ�c(di��n)�����������̎�����ă�(y��u)�c(di��n)��������F(xi��n)��늚�����S���ˆT�ļ����c��(x��)�T���e��PLC�ij����ƣ�����Ҫ���T��Ӌ(j��)��C(j��)�����Z��֪�R�����Dz�����һ�����^������ΈD����A(ch��)�ĺ���ָ����ʽ��ʹ�Ñ�����������ֱ�^�������W(xu��)���{(di��o)ԇ�c���e(cu��)Ҳ���ܷ��㡣�Ñ���ُ�������PLC��ֻ�谴�f��������ʾ���������ĽӾ��ͺ����Ñ�����ľ��ƹ������Ϳ��`���،�PLC��(y��ng)�������a(ch��n)��(sh��)�`��
һ���ɾ��̿������Ļ����Y(ji��)��(g��u)
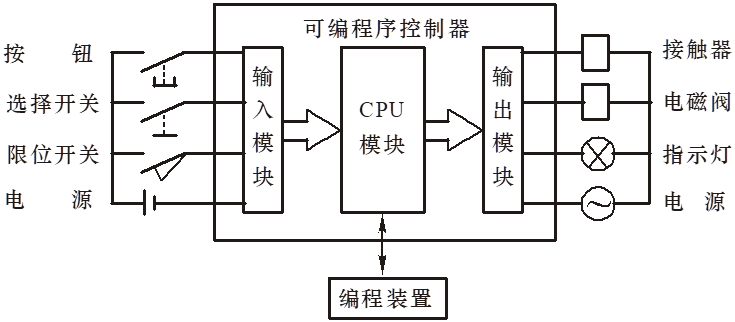
�ɾ��̿�������Ҫ��CPUģ�K��ݔ��ģ�K��ݔ��ģ�K�;������M�ɣ����D��ʾ����
1��CPUģ�K
CPUģ�K�ֽ�����̎���Ԫ�������������Ҫ��̎������CPU���ʹ惦(ch��)���M�ɡ��������\(y��n)���Ñ����O(ji��n)��ݔ��/ݔ���ӿڠ�B(t��i)������߉�Д���M(j��n)�Д�(sh��)��(j��)̎�������xȡݔ��׃��������Ñ�ָ��Ҏ(gu��)���ĸ��N���������Y(ji��)���͵�ݔ���ˣ���푑�(y��ng)�ⲿ�O(sh��)�䣨�美��������X����ӡ�C(j��)�ȣ���Ո���Լ��M(j��n)�и��N��(n��i)���Д�ȡ�PLC�ă�(n��i)���惦(ch��)���Ѓ��һ���ϵ�y(t��ng)����惦(ch��)������Ҫ���ϵ�y(t��ng)�����ͱO(ji��n)�س����Ñ����������g̎���ij���ϵ�y(t��ng)�������ɏS�ҹ̶����Ñ����ܸ��ģ���һ����Ñ�����(sh��)��(j��)�惦(ch��)������Ҫ����Ñ����Ƶđ�(y��ng)�ó����N���攵(sh��)��(j��)�����g�Y(ji��)����
2��I/Oģ�K
I/Oģ�K��ϵ�y(t��ng)���ۡ������֡��_����(li��n)ϵ�ⲿ�F(xi��n)����CPUģ�K�Ę�����ݔ��ģ�K�Á����պͲɼ�ݔ����̖��ݔ����̖�Ѓ��һ��Ǐİ��o���x���_�P(gu��n)����(sh��)�ܴ֓a�_�P(gu��n)����λ�_�P(gu��n)���ӽ��_�P(gu��n)������_�P(gu��n)�������^����ȁ����_�P(gu��n)��ݔ����̖����һ������λ�������ż���y�ٰl(f��)늙C(j��)�����N׃�����ṩ���B�m(x��)׃����ģ�Mݔ����̖��
�ɾ����������ͨ�^ݔ��ģ�K���ƽ��|����늴��y��늴��F���{(di��o)��(ji��)�y���{(di��o)���b�õȈ�(zh��)�������ɾ�������������Ƶ���һ��ⲿؓ(f��)�d��ָʾ������(sh��)���@ʾ�b�ú͈�(b��o)���b�õȡ�
3���Դ
�ɾ����������һ��ʹ��220V�����Դ���ɾ������������(n��i)����ֱ����(w��n)���Դ���ģ�K��(n��i)��Ԫ���ṩֱ��늉���
4��������
��������PLC���ⲿ�����O(sh��)�䣬�Ñ���ͨ�^������ݔ�롢�z�顢�ġ��{(di��o)ԇ�����O(ji��n)ʾPLC�Ĺ�����r��Ҳ����ͨ�^���õľ�����|����PLC�c��X(li��n)�������������þ���ܛ���M(j��n)����X���̺ͱO(ji��n)�ء�
5��ݔ��/ݔ���U(ku��)չ��Ԫ
I/O�U(ku��)չ�ӿ����ڌ��U(ku��)���ⲿݔ��/ݔ�����Ӕ�(sh��)�ĔU(ku��)չ��Ԫ�c������Ԫ�������C(j��)���B����һ��
6���ⲿ�O(sh��)��ӿ�
�˽ӿڿɌ�����������ӡ�C(j��)���l�a����x,׃�l�����ⲿ�O(sh��)���c���C(j��)��(li��n)�����������(y��ng)�IJ�����
����(sh��)�(y��n)�b�ã��䣩�x�õ����C(j��)��̖��Wķ��CP-1Hϵ�е����C(j��)��
�����ɾ��̿������Ĺ���ԭ��
�ɾ��̿������ЃɷN�����Ĺ�����B(t��i)�����\(y��n)�У�RUN����B(t��i)�cֹͣ��STOP����B(t��i)�����\(y��n)�Р�B(t��i)���ɾ����������ͨ�^��(zh��)�з�ӳ����Ҫ����Ñ�����팍(sh��)�F(xi��n)���ƹ��ܡ�����ʹ�ɾ������������ ݔ�����r(sh��)��푑�(y��ng)�S�r(sh��)����׃����ݔ����̖���Ñ�������ֻ��(zh��)��һ�Σ����Ƿ���(f��)������؏�(f��)��(zh��)�У�ֱ���ɾ����������ͣ�C(j��)���ГQ��STOP������B(t��i)��
���ˈ�(zh��)���Ñ�����֮�⣬��ÿ��ѭ�h(hu��n)�^���У��ɾ����������߀Ҫ��Ƀ�(n��i)��̎����ͨ��̎���ȹ�����һ��ѭ�h(hu��n)�ɷ֞�5��(g��)�A�Σ���D��ʾ��
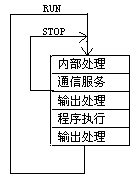
�ڃ�(n��i)��̎���A�Σ��ɾ�����������z��CPU��ģ�K��(n��i)����Ӳ���Ƿ����������O(ji��n)�ض��r(sh��)����(f��)λ���Լ����һЩ�e�ă�(n��i)����������ͨ�ŷ���(w��)�A�Σ��ɾ�����������c�e�Ď�̎�����������b��ͨ�ţ�푑�(y��ng)�������I���������¾��������@ʾ��(n��i)�ݡ�
��ݔ��̎���A�Σ��ɾ�����������������ⲿݔ���·�Ľ�ͨ/���_��ON/OFF����B(t��i)�x��ݔ��ӳ��Ĵ�����
�ڳ����(zh��)���A�Σ���ʹ�ⲿݔ����̖�Ġ�B(t��i)�l(f��)����׃����ݔ��ӳ���
�����Ġ�B(t��i)Ҳ����(hu��)�S֮��׃��ݔ����̖׃���˵Ġ�B(t��i)ֻ������һ��(g��)������
�ڵ�ݔ��̎���A�α��x�롣
��ݔ��̎���A�Σ�CPU��ݔ��ӳ��Ĵ�����ͨ/���B(t��i)���͵�ݔ���i������
�����ɾ��̿������ă�(n��i)��^(q��)��ķֲ���I/O����
CP1H��ʹ�����Ѓ�(n��i)��^(q��)��
| ��(sh��)��(j��)�^(q��) | �� | λ | ���� | |||
|
IR�^(q��)1 |
ݔ��?y��n)^(q��) |
IR 000-IR 009 ��10��(g��)�֣� |
IR 00000-IR 00915 ��160� |
�@Щλ���Է���o�ⲿI/O�ˡ� |
||
| ݔ���^(q��) |
IR 100-IR 019 ��10��(g��)�֣� |
IR 0100-IR 0915��160� | ||||
|
�����^(q��) |
IR 020-IR 049 IR 200-IR 227 ��58��(g��)�֣� |
IR 02000-IR 04915 IR 20000-IR 22715��928� |
�ڳ����п��S��ʹ�ù���λ�� | |||
| SR�^(q��) |
SR 228-SR 255 ��28�֣� |
SR 22800-SR 25515��448λ�� | �@Щλ�����ض����ܣ����(bi��o)־�Ϳ���λ�� | |||
| TR�^(q��) | —— |
TR 0-TR 7 ��8� |
�@Щλ���ڱ�������֧�е�ON/OFF��B(t��i)�� | |||
| HR�^(q��)2 |
HR 00-HR 19 ��20��(g��)�֣� |
HR 0000-HR 1915 ��320� |
�@Щλ���ڱ��攵(sh��)��(j��)�������Դ�P(gu��n)�]��ON/OFF��B(t��i)��׃�� | |||
| AR�^(q��)2 |
AR 00-AR 23 ��24��(g��)�֣� |
AR 0000-AR 2315 ��384� |
�@Щλ�����ض����ܣ����(bi��o)־�Ϳ���λ�� | |||
| LR�^(q��)1 |
LR 00-LR 15 ��16��(g��)�֣� |
LR 0000-LR 1515 ��256� |
�����c����PC�M(j��n)��1��1��(sh��)��(j��)朽ӡ� | |||
| ���r(sh��)��/Ӌ(j��)��(sh��)���^(q��)2 | TC 000-TC 255�����r(sh��)��/Ӌ(j��)��(sh��)����(bi��o)̖��3 | ͬһ��(bi��o)̖�ȿ����ڶ��r(sh��)����Ҳ������Ӌ(j��)��(sh��)���� | ||||
|
DM�^(q��) DM�^(q��) |
�x/��2 |
DM 0000-DM 1999 DM 2022-DM 2047 ��2��026��(g��)�֣� |
—— | DM�^(q��)ֻ�����֞��λ�M(j��n)���L�������Դ�P(gu��n)�]����ֵ���ֲ�׃�� | ||
| �e(cu��)�`��־2 |
DM 2000-DM 2021 ��22��(g��)�֣� |
—— | ���ڱ������l(f��)���e(cu��)�`���e(cu��)�`���a����(d��ng)��ʹ���e(cu��)�`��־���ܕr(sh��)���ɮ�(d��ng)����ͨ�x/��DM�^(q��)ʹ�Ù�(qu��n)�á� | |||
| ֻ�x4 |
DM 6144-DM 6599 ��456��(g��)�֣� |
—— | �����ڳ����������롣 | |||
| PC�O(sh��)��4 |
DM 6600-DM 6655 ��56��(g��)�֣� |
—— | ���ڱ������PC�\(y��n)�еĸ��N����(sh��)�� | |||
CP1HX��
| ��̖ | Ҏ(gu��)�� | ||
| �Դ | ݔ�� | ݔ�� | |
| CP1H-X40DR-A | AC100~250V | �^���ݔ��16�c(di��n) | DC24V 24�c(di��n) |
| CP1H-X40T1-D | DC24V | ���w��ݔ��©�� 16�c(di��n) | DC24V 24�c(di��n) |
| CP1H-X40DT1-D | ���w��ݔ��Դ�� 16�c(di��n) | ||
CP1HXA��
| ��̖ | Ҏ(gu��)�� | ||
| �Դ | ݔ�� | ݔ�� | |
| CP1H-XA40DR-A | AC100~250V | �^���ݔ��16�c(di��n) | DC24V 24�c(di��n) |
|
CP1H-XA40T1-D CP1H-XA40DT1-D |
DC24V | ���w��ݔ��©�� 16�c(di��n) | DC24V 24�c(di��n) |
| ���w��ݔ��Դ�� 16�c(di��n) | |||
| CP1H-Y20DT-D | DC24V | ���w��ݔ��©��8�c(di��n) | DC24V 12�c(di��n) |
�ġ��ɾ��̿������ľ����Z�Ը���
�F(xi��n)���Ŀɾ��̿�����һ����ж�N�����Z�ԣ����Ñ�ʹ�á�IEC1131-3—�ɾ���������������Z�Եć��H��(bi��o)��(zh��n)Ԕ��(x��)���f���������ɾ��̿����������Z�ԣ�
����܈D
���ΈD
���܉K�D
ָ���
�Y(ji��)��(g��u)�ı�
�������ΈD��ʹ�õ����Ŀɾ��̿������D�ξ����Z�ԡ����ΈD�c�^�������ϵ�y(t��ng)���·�D�����ƣ�����ֱ�^���ă�(y��u)�c(di��n)�������ױ����S��Ϥ�^������Ƶ�늚��ˆT���գ��e�m�����_�P(gu��n)��߉���ơ�
���ΈD����Ҫ���c(di��n)��
1���ɾ��̿��������ΈD�е�ijЩ����Ԫ���������^����@һ���Q����ݔ���^�����ݔ���^�������(n��i)���o���^����ȣ��������������挍(sh��)�������^�������Ӳ���^�������������ܛ����ʹ�õľ���Ԫ����ÿһ����Ԫ���c�ɾ�����������惦(ch��)����Ԫ��ӳ��Ĵ�����һ��(g��)�惦(ch��)��Ԫ������(y��ng)��
2�����ΈD�ɂ�(c��)�Ĵ�ֱ�������Q�鹫��ĸ����BUS bar�����ڷ������ΈD��߉�P(gu��n)ϵ�r(sh��)�����˽����^����·�ķ��������������������҃ɂ�(c��)ĸ��֮�g��һ��(g��)������ؓ(f��)��ֱ���Դ늉�����(d��ng)�D�е��|�c(di��n)��ͨ�r(sh��)����һ��(g��)�����“�������”��“������Power flow������������(d��ng)���@һ�����c��(zh��)���Ñ�����r(sh��)��߉�\(y��n)��������һ�µġ�
3������(j��)���ΈD�и��|�c(di��n)�Ġ�B(t��i)��߉�P(gu��n)ϵ������c�D�и���Ȧ����(y��ng)�ľ���Ԫ���Ġ�B(t��i)���Q�����ΈD��߉���㡣߉�����ǰ����ΈD�Џ��ϵ��¡������ҵ�����M(j��n)�еġ�
4�����ΈD�еľ�Ȧ������ݔ��ָ�(y��ng)��������߅��
5�����ΈD�и�����Ԫ���ij��_�|�c(di��n)�ͳ��]�|�c(di��n)�����ԟo��ε�ʹ�á�
�塢�ɾ��̿������ľ��̲��E
��1���_������ϵ�y(t��ng)�����ɵĄ�(d��ng)��������@Щ��(d��ng)�������
��2������ݔ��ݔ���O(sh��)�䣬���_����Щ����O(sh��)��������̖��PLC����Щ������O(sh��)���ǽ��Ձ���PLC��̖�ġ�����PLC��ݔ�롢ݔ�����c֮����(y��ng)�M(j��n)�з��䡣
��3���O(sh��)Ӌ(j��)PLC�������ΈD�����ΈD�w�F(xi��n)�˰������_�������Ҫ���ȫ�����ܼ�����P(gu��n)ϵ��
��4����(sh��)�F(xi��n)��Ӌ(j��)��C(j��)��PLC�����ΈDֱ�Ӿ��̡�
��5���������M(j��n)���{(di��o)ԇ��ģ�M�ͬF(xi��n)������
��6����������ɵij���
�@Ȼ���ڽ���һ��(g��)PLC����ϵ�y(t��ng)�r(sh��)��������Ȱ�ϵ�y(t��ng)����Ҫ��ݔ�롢ݔ����(sh��)���_������Ȼ����Ҫ�_�����N���Ƅ�(d��ng)����������(g��)�����b�ñ˴�֮�g����P(gu��n)ϵ���_�������ϵ���P(gu��n)ϵ֮�Ϳ��M(j��n)�о��̵ĵڶ�����������ݔ��ݔ���O(sh��)�䣬�ڷ�����PLC��ݔ��ݔ���c(di��n)����(n��i)���o���^��������r(sh��)����Ӌ(j��)��(sh��)��֮�Ϳ����O(sh��)Ӌ(j��)PLC�������ΈD���ڮ����ΈD�r(sh��)Ҫע��ÿ��(g��)����߅ĸ���_ʼ��߉�б�횽Kֹ��һ��(g��)�^�����Ȧ�r(sh��)����Ӌ(j��)��(sh��)�����c��(sh��)�H���·�D��һ�ӡ����ΈD���ú�ʹ�þ���ܛ��ֱ�Ӱ����ΈDݔ��Ӌ(j��)��C(j��)�����d��PLC�M(j��n)��ģ�M�{(di��o)ԇ����→���dֱ�����Ͽ���Ҫ���@���dz����O(sh��)Ӌ(j��)������(g��)�^�̡�
�ɾ��̿���������ָ���
CP1Hϵ��PLC���C(j��)����ָ���
| ��ӛ�� | ���Q | ���� |
| LD | �b�d | ָ��λ����ָ���е��_ʼ��ʹ�Ù�(qu��n)��AND LD��ORLDָ��r(sh��)���x߉�K�� |
| AND | �c | ָ��λ�c��(zh��)�Зl���M(j��n)��߉�c�\(y��n)�㡣 |
| AND LD | ߉�K�c | ǰ�����K�M(j��n)��߉�c�\(y��n)��ĽY(ji��)���� |
| AND NOT | �c�� | ָ��λ�ķ��c��(zh��)�Зl���M(j��n)��߉�c�\(y��n)�㡣 |
| OR | �� | ָ��λ�c��(zh��)�Зl���M(j��n)��߉���\(y��n)�㡣 |
| OR NOT | ��� | ָ��λ�ķ��c��(zh��)�Зl���M(j��n)��߉���\(y��n)�㡣 |
| OUT | ݔ�� |
�ڈ�(zh��)�Зl����ON�r(sh��)ʹ������(sh��)λ׃ON���ڈ�(zh��) �Зl����OFF�r(sh��)ʹ������(sh��)λ׃OFF�� |
| SET | ��λ | �ڈ�(zh��)�Зl����ON�r(sh��)ʹ������(sh��)λ׃ON���ڈ�(zh��)�Зl����OFF�r(sh��)��Ӱ푲���λ�Ġ�B(t��i)�� |
| RSET | ��(f��)λ | �ڈ�(zh��)�Зl����ON�r(sh��)ʹ����λ��(sh��)׃OFF, �ڈ�(zh��)�Зl����OFF�r(sh��)��Ӱ푲�����(sh��)λ�Ġ�B(t��i)�� |
| NOP | �ղ��� | �����κβ����������D(zhu��n)�Ƶ���һ��(g��)ָ� |
| END | �Y(ji��)�� | ���ڳ���Y(ji��)���� |
| JMP | ���D(zhu��n) | ������D(zhu��n)�l����OFF���tJMP��04���cJME��05��֮�g������ָ��������� |
| JME | ���D(zhu��n)�Y(ji��)�� | |
| SFT | ��λ�Ĵ��� | ����һ��(g��)λ��λ�Ĵ��� |
| KEEP | ���� | ��һ��(g��)λ���x������λݔ��͏�(f��)λݔ����Ƶ��i�档 |
| TIM | ���r(sh��)�� | ON���t���p��(sh��)�����r(sh��)�������� |
| CNTR | ����Ӌ(j��)��(sh��)�� | ���ӻ�p��ݔ����̖��OFF׃ON�r(sh��)�����ӻ�pСPVֵ�� |
| DIFU | �������� | ��ݔ����̖�������ؕr(sh��)�̌�ij��(g��)ָ��λ׃ONһ��(g��)ѭ�h(hu��n)���ڡ� |
| DIFD | �½����� | ��ݔ����̖���½��ؕr(sh��)�̌�ij��(g��)ָ��λ׃ONһ��(g��)ѭ�h(hu��n)���ڡ� |
| @MOV | ���� | ��Դ��(sh��)��(j��)���ֻ�(sh��)����(f��)�Ƶ�Ŀ��(bi��o)���С� |
| @ASL | ���g(sh��)���� | ������?j��n)?sh��)��(j��)�е�ÿһλ�����M(j��n)�Ў�CY��λ�� |
| @ASR | ���g(sh��)���� | ������?j��n)?sh��)��(j��)�е�ÿһλ�����M(j��n)�Ў�CY��λ�� |
| AND LD | ߉�K�c | ǰ�����K�M(j��n)��߉�c�\(y��n)��ĽY(ji��)���� |
| OR LD | ߉�K�� | ǰ�����K�M(j��n)��߉���\(y��n)��ĽY(ji��)���� |
|
NETR NETW |
TABLE,PORT TABLE,PORT |
�W(w��ng)�j(lu��)�x �W(w��ng)�j(lu��)�� |
|
SLCR SLCT SLCE |
N N |
혿��^����εĆ���(d��ng) 혿��^����ε��D(zhu��n)�Q 혿��^����εĽY(ji��)�� |