
�������쿂�w�����O(sh��)Ӌ(j��)
����������һ�N���M(j��n)�������^�̡�ϵ�y(t��ng)��ģʽ�Ŀ��Q����������Ϣ�Ը�֪���ԛQ�ߡ��Ԉ�(zh��)�еȹ��ܣ�ͨ�^����ں������^�̵ĸ����h(hu��n)��(ji��)�c��һ����Ϣ���g(sh��)������(li��n)�W(w��ng)����(sh��)��(j��)����Ӌ(j��)�㡢�˹����ܵȁ팍(sh��)�F(xi��n)�������������Ҫ�������������ܹ��S���d�w�����P(gu��n)�I����h(hu��n)��(ji��)�����ܻ�����ģ��Զ˵��˔�(sh��)��(j��)������A(ch��)�����ԾW(w��ng)ͨ��(li��n)��֧�Ρ�����Ҫ��(n��i)�ݰ������ܮa(ch��n)Ʒ���������a(ch��n)�����ܹ��S�����������ȡ�
�������첻�H�H��“�˹�����”ϵ�y(t��ng)�������˙C(j��)һ�w������ϵ�y(t��ng)�����@��ϵ�y(t��ng)�У�����Ȼ̎�ں��ĵ�λ�����ܙC(j��)������Ϻ��o�������á����ڴ�֛Q���ϰl(f��)�]���w���ã��������^�̵Č�(sh��)�w�{(di��o)���t�əC(j��)��������ɣ��˙C(j��)֮�g���@���ܡ���f(xi��)����
�������쌢��(sh��)��(j��)���(y��ng)���ڹ��I(y��)�I(l��ng)��ͨ�^�W(w��ng)�j(lu��)�R��ԭ��̎�ڹ�����B(t��i)�ĺ�����(sh��)��(j��)����(sh��)�F(xi��n)���c�ˡ����c����c��֮�g���B�ӣ������nj�(sh��)�F(xi��n)�K���Ñ��c����ͷ���(w��)�^�̵��B�ӡ����⣬����(w��)������͂��Ի�����Ҳ�������������Ҫ���c(di��n)��
����������ԑ�(y��ng)���ڶ����ИI(y��)���I(l��ng)�������ܹ��S�����ܼҾӡ�����늾W(w��ng)��3D��ӡ���ǻ۳��С���܇����͙C(j��)��������ȡ����@Щ�I(l��ng)���У��������켼�g(sh��)���Ԍ�(sh��)�F(xi��n)���a(ch��n)�^�̵��Ԅӻ������ܻ���������a(ch��n)Ч�ʺͮa(ch��n)Ʒ�|(zh��)�������ͳɱ����M�む�Ի�����
��������İl(f��)չڅ�ݰ�����(sh��)�\����ģ��������������Y(ji��)�ϔ�(sh��)�ֻ����ߡ�ȫ�S��ȫ����Դ���h(hu��n)��һ�w���ܿ��c�ԃ�(y��u)�����a(ch��n)Ʒȫ������������؞ͨ�͘I(y��)��(w��)�f(xi��)ͬ���Լ����a(ch��n)ȫ���̴�ͨ�ȡ��@Щڅ���M(j��n)һ���Ƅ���������İl(f��)չ����(sh��)�F(xi��n)����Ч��������(zh��n)�����`������a(ch��n)��ʽ��
һ�����O(sh��)����
�����������������ȫ����(n��i)��l(f��)չ���ɞ���H��������Ҫ�Ƹ��c(di��n)���e���ڹ��I(y��)��(li��n)�W(w��ng)���˹����ܡ���(sh��)��(j��)����Ӌ(j��)����I(l��ng)��Ŀ������M(j��n)�͑�(y��ng)�ã��M(j��n)һ���Ƅ�����������ĸ�����׃��҇�����ȫ����������I(y��)������e�O푑�(y��ng)����̖�٣��ӿ��Ƅ��������켼�g(sh��)���аl(f��)�ͮa(ch��n)�I(y��)����ȫ��������Ї��HӰ����ĸ߶��������쌍(sh��)Ӗ(x��n)���ء�
�������ߌ������������錍(sh��)ʩ��(chu��ng)���(q��)�Ӱl(f��)չ��(zh��n)�Ե���Ҫ��(n��i)�ݣ���ͨ�^�Ӵ�Ͷ�롢�ӏ�(qi��ng)����֧�֡��ƄӮa(ch��n)�W(xu��)�к����ȷ�ʽ�����������ṩ��(ji��n)��(sh��)֧�Ρ���“�Ї�����2025”�����I(l��ng)���҇��ӿ��Ƅӹ��I(y��)4.0��(bi��o)��(zh��n)�����ӏ�(qi��ng)���������b���cϵ�y(t��ng)���аl(f��)�����M(j��n)����I(y��)��(sh��)�ֻ�����Ϣ���D(zhu��n)�͡����⣬����߀�e�O��(g��u)���������섓(chu��ng)�����ĺ߶��˲���Ӗ(x��n)���أ����B(y��ng)һ�������������˲��(du��)�顣
�����������I(l��ng)���¼��g(sh��)����ӿ�F(xi��n)���˹����ܡ��C(j��)���˼��g(sh��)����(li��n)�W(w��ng)����(sh��)��(j��)���ѳɞ���������ĺ����(q��)���������磬�˹����ܵđ�(y��ng)��ʹ�ù��S�܉�?q��)��F(xi��n)�����Q�ߺ̓�(y��u)�����a(ch��n)���C(j��)���˼��g(sh��)�İl(f��)չʹ�����a(ch��n)�����Ԅӻ��̶ȴ����ߣ���(li��n)�W(w��ng)���ռ�ʹ���O(sh��)��֮�g�Ļ��B���ӱ�ݸ�Ч����(sh��)��(j��)���\(y��n)�Ät�������^���ṩ�˸��Ӿ��_�Ĕ�(sh��)��(j��)֧�֡��@Щ�¼��g(sh��)�đ�(y��ng)�Ì��M(j��n)һ����������I(y��)��Ч�ʺ��|(zh��)��ˮƽ���Ƅ���������Ŀ��ٰl(f��)չ��
չ��δ�������������ИI(y��)���ʬF(xi��n)�����ׂ��l(f��)չڅ�ݡ����ȣ��������쌢�M(j��n)һ�����ܻ���ͨ�^�����㷨�������W(xu��)��(x��)��������(sh��)�F(xi��n)���ܻ������a(ch��n)�Q�ߺ̓�(y��u)���{(di��o)�ȣ�������a(ch��n)Ч�ʺ��YԴ�����ʡ���Σ����I(y��)��(li��n)�W(w��ng)����(li��n)�W(w��ng)���γɸ������ƵľW(w��ng)�j(lu��)�wϵ���B�Ӹ����h(hu��n)��(ji��)�ͅ��c���w����(sh��)�F(xi��n)ȫ�����YԴ�����ͅf(xi��)ͬ���������⣬�Gɫ����Ϳɳ��m(x��)�l(f��)չ���ɞ������������ҪĿ��(bi��o)��ͨ�^��(ji��)�ܜp�ź��YԴѭ�h(hu��n)���ã���(sh��)�F(xi��n)��(j��ng)��(j��)Ч��ͭh(hu��n)�����o(h��)���p��Ŀ��(bi��o)��
��У�ĸ߶��������쌍(sh��)Ӗ(x��n)���صĽ��O(sh��)�������ڑ�(y��ng)����������l(f��)չ��������(zh��n)���C(j��)����ͨ�^�ṩ���M(j��n)���O(sh��)��ͼ��g(sh��)ƽ�_����W(xu��)���ṩ��(sh��)�`���������g(sh��)��Ӗ(x��n)�̈́�(chu��ng)���O(sh��)Ӌ(j��)�ȶ�N�W(xu��)��(x��)�C(j��)�������B(y��ng)�߂䄓(chu��ng)�¾���͌�(sh��)�`�����Č��I(y��)�˲š��c��ͬ�r����(sh��)Ӗ(x��n)���،��c��I(y��)�����ЙC(j��)��(g��u)�Ƚ����o�ܺ����P(gu��n)ϵ����ͬ�_չ�����(xi��ng)Ŀ�ͼ��g(sh��)��(chu��ng)�£��Ƅ��������켼�g(sh��)�IJ��������ͮa(ch��n)�I(y��)�Ŀɳ��m(x��)�l(f��)չ��ͨ�^�@�N�a(ch��n)�W(xu��)����ȽY(ji��)�ϵ�ģʽ�����ߵȽ����c��(sh��)�H��(y��ng)�þo�ܽY(ji��)�ϣ������������I(l��ng)��ĿƼ���(chu��ng)�º��˲����B(y��ng)�ṩ��(qi��ng)������֧�ֺͱ��ϡ�
�������w�����O(sh��)Ӌ(j��)
1.���������˲����B(y��ng)˼·
��1�����������I(l��ng)���˲�����
Ŀǰ���������I(l��ng)����˲������ռ��g(sh��)�Ӵ��ɜ\����֞��������
�F(xi��n)�����̎����߂��S����늚⡢�C(j��)е֪�R���ܳГ�(d��n)ϵ�y(t��ng)�ĬF(xi��n)�����𡢌�PLC�M(j��n)�к��ε��_�l(f��)���ӹ���Ԫ���I(y��)�C(j��)���˵ľ��̲��������Կ��ٵ��\����ϲ��M(j��n)�оS�o(h��)��
��(y��ng)�ù��̎����쾚���ՙC(j��)е�C(j��)��(g��u)���F(xi��n)���W(w��ng)�j(lu��)�����I(y��)�C(j��)���ˡ��C(j��)��ҕ�X��PLC�������I(l��ng)���P(gu��n)�I���g(sh��)�����Ԍ����ܽM���M(j��n)�м��ɡ��_�l(f��)���{(di��o)ԇ����(sh��)�F(xi��n)�C(j��)��(g��u)��(y��u)������ˇ����(sh��)��(y��u)���ȡ�
ϵ�y(t��ng)���̎������ڙC(j��)е��늚⡢���ơ����I(y��)��(li��n)�W(w��ng)��Ӌ(j��)��C(j��)�I(l��ng)���б��^����о����߂�����ϵ�y(t��ng)���_�l(f��)���������Ը���(j��)ϵ�y(t��ng)�ܘ�(g��u)��ݔ��ݔ�����_�l(f��)�O(sh��)�䡢���ơ��z�y����(sh��)��(j��)ϵ�y(t��ng)�ȹ��ܽM����
�ܘ�(g��u)���̎����߂���깤����(j��ng)�(y��n)�����C(j��)е��늚⡢���ơ��W(w��ng)�j(lu��)���I(l��ng)�����S���Ĺ��̌�(sh��)�`��(j��ng)�v�����������ĸ���(j��)���a(ch��n)����ˇ�^�̡��������(y��ng)朁����xϵ�y(t��ng)�ܘ�(g��u)����Ϣ�ܘ�(g��u)��
��2�����������˲����B(y��ng)�]�h(hu��n)
�������������P(gu��n)�Č�(sh��)Ӗ(x��n)ƽ�_�����a(ch��n)������A(ch��)�������ҹ�˾����������C�ό�(sh��)Ӗ(x��n)���أ��Լ��C(j��)����ҕ�X��֪�c���Ƽ��g(sh��)���ҹ����о����ġ��潭�r���C(j��)�����о�Ժ�ļ��g(sh��)�������Y(ji��)�϶��������������͙C(j��)�����ИI(y��)�S���Č�(sh��)�`��(y��ng)�ý�(j��ng)�(y��n)���ɘ�(g��u)���˲����B(y��ng)�]�h(hu��n)���Ќ�(sh��)��(xi��ng)Ŀ�(q��)��ʽ���挍(sh��)��(y��ng)�È������������B(y��ng)�W(xu��)���Ĺ��̑�(y��ng)��������
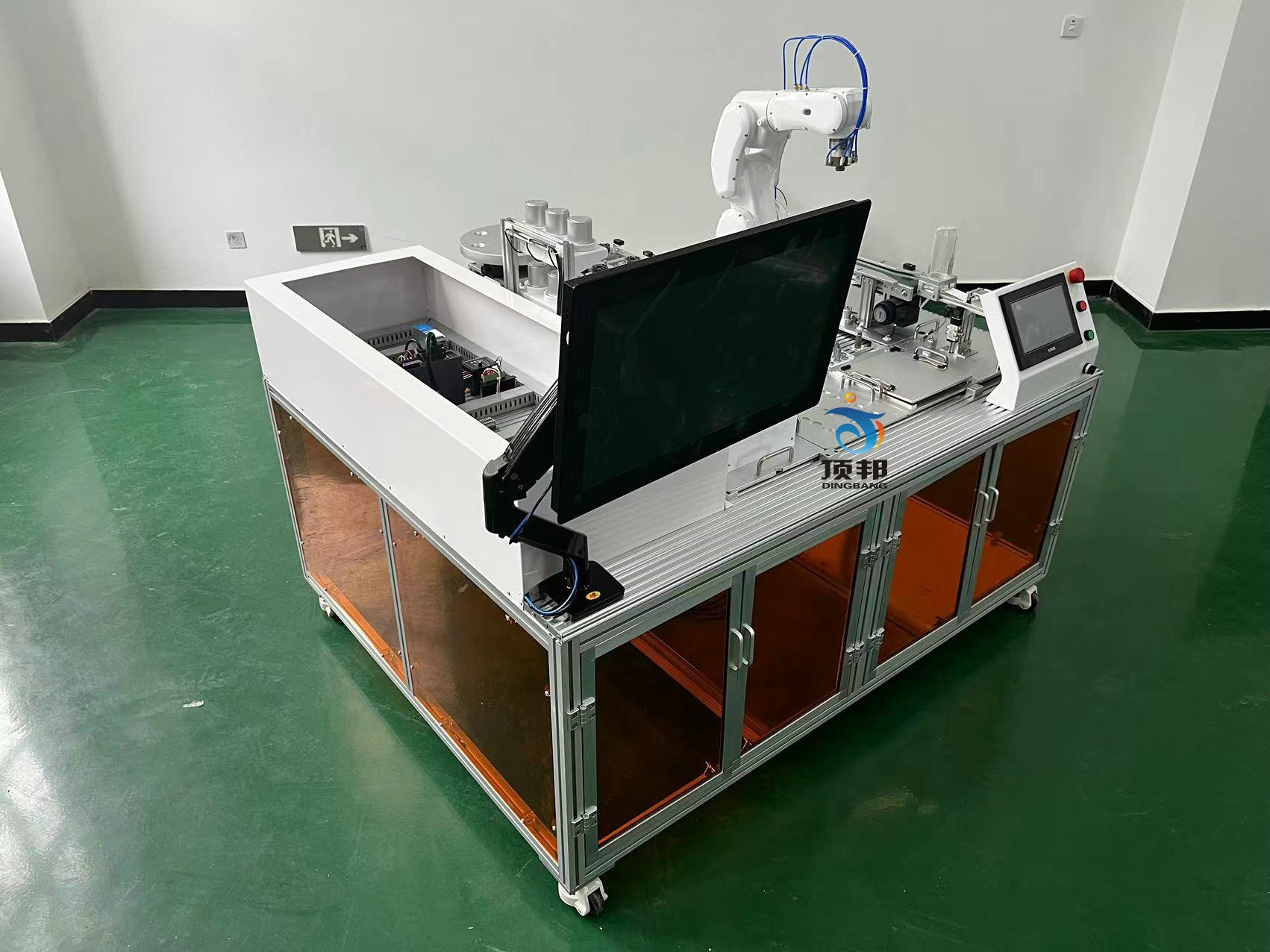
�DƬ
��3�����������˲����B(y��ng)���h�n���O(sh��)��
�n���Ԃ��y(t��ng)���Ԅӻ��͙C(j��)е���P(gu��n)�n�̞���A(ch��)�����뮔(d��ng)ǰ�������˹����ܡ��C(j��)��ҕ�X��̓�M������¼��g(sh��)���γɷ�����������δ���l(f��)չڅ�ݵ��˲����B(y��ng)������
2.��(sh��)Ӗ(x��n)���ز����c����
�����c�a(ch��n)�I(y��)������Ȼ��(li��n)ϵ����ˣ��ڌ�(sh��)Ӗ(x��n)���صĽ��O(sh��)�ϣ�������“�ь��I(y��)���ڮa(ch��n)�I(y��)���”��˼�룬���@�a(ch��n)���ںϵ�����M�����w������λ�����һ�l�����Ĺ��I(y��)�������a(ch��n)�������a(ch��n)����ȫ����(bi��o)��I(y��)�挍(sh��)���a(ch��n)��r����ͬ�r�M�㌦��Փ�̌W(xu��)����(sh��)�`�̌W(xu��)����I(y��)���a(ch��n)�Ľ������Ķ������ӏ�(qi��ng)�Ծ͘I(y��)�錧(d��o)��Ľ���Ŀ��(bi��o)���ƄӸ�У�Ľ̌W(xu��)�ĸ
�����܄��֣���(sh��)Ӗ(x��n)���ذ��������������a(ch��n)���������\(y��n)�S����ϵ�y(t��ng)��̓�M����̌W(xu��)ϵ�y(t��ng)�������c��ȫ���o(h��)ϵ�y(t��ng)��MESϵ�y(t��ng)���ǻ�܇�g�߾��ȶ�λϵ�y(t��ng)���Լ���(sh��)Ӗ(x��n)���ع���ϵ�y(t��ng)���߂����֡�
1+X���I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)�_�ɹ��I(y��)�C(j��)���ˡ���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_����Q����ģ�K���Ӽ����b��ƽ���L�Dģ�K�������L�Dģ�K�����\(y��n)ģ�K���a��ģ�K��ͨ��늚�ӿ������}��ģ�K����ʽ����ģ�K��Ƥ���\(y��n)ݔģ�K���b��ģ�K���������������RFID ģ�K�����D(zhu��n)����ģ�K��׃λ�C(j��)ģ�K����Pģ�K�����ϕ���ģ�K��PC Interface ģ�K��Multitasking ģ�K��World zonesģ�K��Ӌ(j��)��C(j��)�c���Ρ��o���o����á�ģ�K�惦���x�����̷���ܛ���M�ɡ�
1+X���I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)�_ϵ�y(t��ng)���빤�I(y��)�C(j��)���˼��g(sh��)���C(j��)е���Ӽ��g(sh��)�����늹����g(sh��)����N���I(y��)���g(sh��)�����܂��м��g(sh��)���ɾ��̿��Ƽ��g(sh��)���C(j��)��ҕ�X���g(sh��)��Ӌ(j��)��C(j��)���g(sh��)������ͨ�ż��g(sh��)����̫�W(w��ng)ͨӍ���g(sh��)���x�����̷��漼�g(sh��)�����M(j��n)���켼�g(sh��)�����w���I(y��)�C(j��)���ˡ��C(j��)е�O(sh��)Ӌ(j��)��늚��Ԅӻ������܂��С���������ȶ��T�W(xu��)�ƵČ��I(y��)֪�R��
1+X���I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)�_���й��I(y��)�C(j��)���ˑ�(y��ng)�þ����м���������(sh��)Ӗ(x��n)���˹��ܣ����M(j��n)�й��I(y��)�C(j��)���ˑ�(y��ng)�þ��̣����������C��


1�������匍(sh��)Ӗ(x��n)�_
1+X���I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)�_�X�ͲĴ����(sh��)Ӗ(x��n)�_�ߴ粻С��1800mm*1400mm*800mm,ǰ���_�P(gu��n)�T��������ÿ�ҕ�����ϣ��ײ��k���壬��C(j��)���ˡ�����ģ�K�İ��b�ṩ��(bi��o)��(zh��n)�İ��b�ӿڣ��A(y��)���И�(bi��o)��(zh��n)��Դ��늚�ӿڰ��bλ�ã�����(j��)ģ�K��ʹ����r�M(j��n)�й��ܵĔU(ku��)չ��ͬ�r�鹤�I(y��)�C(j��)���ˡ�����ģ�K���������ṩ��(w��n)�����Դ��ƽ�_�Ͽ��ι̰��b��N����ģ�K��
��Ҫ���g(sh��)����(sh��)��
1)��ģ�K�̶��壺8����
2)�����늚�ӿ�������3 �M��
3������(sh��)Ӗ(x��n)ģ�K������M�Ϸ��ã��ɹ̶���
4������(sh��)Ӗ(x��n)�_���� 21.5 ���Һ���|���@ʾ����I3̎������4G��(n��i)�棬128�̑B(t��i)����ӳ���@ʾ�C(j��)����ʾ���������ͬ�r����ͨ�^�|��ͬ������ʾ��ϵ�y(t��ng)�����ڬF(xi��n)���̌W(xu��)�v�ݼ�չʾ�������_(d��)���p��(li��n)�ӡ��p�|�p�ع��ܣ�“����չʾ������̌W(xu��)”��
2����Q����ģ�K
�ɿ�Q֧�ܡ��z�y����������Q�P�ȽM�ɡ�����(j��)��ͬ�Č�(sh��)Ӗ(x��n)Ŀ��(bi��o)�Ͳ��������ṩ��N��ͬ�Ŀ�Q���ߡ�
2.1����Q֧�ܼ��g(sh��)����(sh��)
1)��֧�����γߴ磨�L×��×�ߣ���300×300×180mm��
2���������ߴ磨�L×��×�ߣ���300×300×8mm��
3)��������4 ����Q���ߡ�
2.2����Q�P���g(sh��)����(sh��)��
1)����Q�b�ò��|(zh��)�����w���|(zh��)�X�Ͻ𣬾o�i�C(j��)��(g��u)�Ͻ�䓣�
2)�����أ�2kg��
3)�����S���أ�20N·m��
4)������������0.3-1MPa��
5)��������≤0.5kg��
2.3�������P�����g(sh��)����(sh��)
1)�����P�P����20mm��
2)��������≥10N������հl(f��)������늴��y��
2.4��늙C(j��)��צ�����g(sh��)����(sh��)��
1)�������≥12mm��
2)���г̣�≥24mm��
2.5���P(gu��n)��(ji��)��צ�����g(sh��)����(sh��)��
1)�������≥12mm��
2)���г̣�≥24mm
2.6���oԴ�����g(sh��)����(sh��)��
1)��������ͣ��L�D�P���ߣ����ٹP���ߣ�ģ�M�������ߡ�
2.7������P�����g(sh��)����(sh��)��
1)���ɫ���t��
2)��������ͣ��c(di��n)���⡣
3���Ӽ����b
��(sh��)Ӗ(x��n)�(xi��ng)Ŀ�Ĺ��������M�b�����P(gu��n)��(ji��)����늙C(j��)�������a�������a����������a�ⷽ��������
�P(gu��n)��(ji��)���ɲ����� 3 �N����M�ɣ���(y��ng)�Õr�����늙C(j��)����ͬʹ�ã���(g��u)�ɿ�Ӌ(j��) 6 �N����ĽM�b����
3.1���M�b�����g(sh��)����(sh��)��
1)����(sh��)����6 �ף�
2)���ɫ�N�2 �N��
3)������N�6 �N���P(gu��n)��(ji��)�� 3 �N��늙C(j��)�� 3 �N����
4)������ȫ�M�b���Զ��x�M�b��
3.2���a�������g(sh��)����(sh��)��
1)������N�2 �N��
2)����������ɫ�N�2 �N���t���{(l��n)����
3)�����������(sh��)����≥10 ����
4)����������ߴ磨�L×��×�ߣ���30×30×12mm��
5)����������ɫ�N�≥2 �N���t���{(l��n)����
6)�����������(sh��)����≥10 ����
7)����������ߴ磨�L×��×�ߣ���30×60×12mm��
4��ƽ���L�Dģ�K
��ƽ���L�D�塢���P����ֵȽM�ɡ�
��Ҫ���g(sh��)����(sh��)��
1)��ƽ���L�Dģ�K�ߴ磨�L×������300×300mm���߶� 40-200mm ������׃��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���D�ӏ���(sh��)��8 ����
4)��ƽ���L�D��ߴ磨�L×��×�ߣ���250×245×6mm��
5�������L�Dģ�K
�������L�D�塢���P����ֵȽM�ɡ�ģ�K���л��A(ch��)܉�E��Ҳ�M���Զ��x�A(y��)�O(sh��)܉�E��
1)�������L�Dģ�K�ߴ磨�L×��×�ߣ���300×300×100mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)�������L�D��ߴ磨�L×��×�ߣ���250×200×35mm��
4)���A(y��)�O(sh��)�D����ֱ������������������(bi��o)ϵ������������(bi��o)ϵ��
6�����\(y��n)ģ�K
�ɹ̶��װ塢���P����ֵȽM�ɡ����ж�N��ͬ��͵Ď�λ��ʹ��늙C(j��)���M��C(j��)���ˌ���ͬ����İ��\(y��n)��
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���300×300×40mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)�����ݼ{�������(sh��)��15 ����
4)��������ʽ��3 �� 5 �С�
7���a��ģ�K
�ɴa��̶��װ塢���P����ֵȽM�ɡ�ʹ�ôa������(sh��)�F(xi��n)�C(j��)���˴a���⡣
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���300×300×40mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)��������������ι��� 9 �������ι��� 9 �����ɻ��b��
8��ͨ��늚�ӿ���
�m��C(j��)�һ�w������ģ�K����ģ�K�ṩ��(w��n)�����Դ�Ϳ������YԴ��
8.1��������
��������ģ�K����(sh��)�����U(ku��)չģ�K��ģ�M���U(ku��)չģ�K�����I(y��)���Q�C(j��)��
��Ҫ���g(sh��)����(sh��)��
��һ������ģ�K
1����֧�� EtherCAT �� DeviceNet��
��������(sh��)�����U(ku��)չģ�K
1)����(sh��)����ͨ����16DI/DO��
2)���Դ��DC24V��
������ģ�M���U(ku��)չģ�K
1)��ģ�M��ͨ����4AI/AO��
2)���Դ��DC24V��
���ģ����I(y��)���Q�C(j��)
1)���˿ڔ�(sh��)����8��
2)���Դ��DC24V��
8.2��늚�ӿ�ģ�K��
늚�ӿ�ģ�K���b�ژ�(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_�_���ϣ����� 3 �Mͨ��늚�ӿں� 1 �M늚⌣�ýӿڡ�ͨ�^��往�|�c����Դ����
ģ�K�M(j��n)���B�ӣ���(sh��)�F(xi��n)�O(sh��)�������c��ģ�K֮�g�Ĺ�늼�ͨӍ��
6��M�����¹������c(di��n)��
1����ͬ��ͽӿ�ͨ�ã�
2������ͬ��ͽӿڷ������o(h��)��
3�����ӿڲ������t�c(di��n)����ָʾ��
4�����ӿ�ͨ�^�����|�M(j��n)���B�ӡ�
����ͨ��늚�ӿ�ģ�K���g(sh��)����(sh��)��
1����ͨ����(sh��)��9��
2�����Դ��DC24V ��(d��)����늣�
3������(sh��)������5DI/DO��
4����ģ�M����1AI/AO��
5����RJ45 �ӿڔ�(sh��)��2��
6��������Դ���C(j��)����ֱ�ӿ��ƣ�
ͨ��늚�ӿڼ��g(sh��)����(sh��)��
1�����Դ��DC24V���˿ڔ�(sh��) 2��
2����ģ�M��ݔ��ӿڣ�0-10V,DC24V ��(d��)����늣�
3����ģ�M��ݔ���ӿڣ�0-10V,DC24V ��(d��)����늣�
4������(sh��)����ݔ��ݔ���ӿ� 1��1DI/1DO��DC24V ��(d��)����늣�
5������(sh��)����ݔ��ݔ���ӿ� 2��2DI/2DO��DC24V ��(d��)����늣�
6������(sh��)����ݔ��ݔ���ӿ� 3��2DI/2DO��DC24V ��(d��)����늣�
7����RJ45 �ӿڔ�(sh��)��2��
����늚�ӿڼ��g(sh��)����(sh��)��
1����׃λ�C(j��)�ŷ������ӿڣ�SV1-1�����_��(sh��) 6
2����׃λ�C(j��)�ŷ����a���ӿڣ�SV1-2�����_��(sh��) 4
3���������S�ŷ������ӿڣ�SV2-1�����_��(sh��) 6
4���������S�ŷ����a���ӿڣ�SV2-2�����_��(sh��) 4
5����Ƥ���{(di��o)��늙C(j��)�ӿڣ�AV1�����_��(sh��) 5
6�������D(zhu��n)׃λ�C(j��)���M(j��n)ϵ�y(t��ng)�ӿڣ�DRV1�����_��(sh��) 7
7����RFID �ӿڣ�RFID1�����_��(sh��) 8
8.3����往�|
��往�|��Ҫ����늚�ӿ�ģ�K�c������ģ�K֮�g��늚��B���c��Ϣ��ݔ�����|�ɶ˿Ɍ�(sh��)�F(xi��n)���ٲ�Ρ�
��Ҫ���c(di��n)��
1���������^�������o(h��)������B�������t�c(di��n)����ָʾ��
2������ͬ�����|���ɫ�^(q��)�֣�
3�����ɿ����B�Ӳ�ͬ��ͨ�� IO �ӿڣ���(sh��)�F(xi��n)���O(sh��)��Ŀ��ƣ�
4�����ɿ����B��ͨ���Դ�ӿڣ���(sh��)�F(xi��n)ģ�K��늣�
5�����ɿ����B��׃λ�C(j��)��ģ�K����늚�ӿڣ���(sh��)�F(xi��n)�O(sh��)��Ĺ���c���ƣ�
6���ɿ����B��ͨ����̫�W(w��ng)�ӿڣ���(sh��)�F(xi��n)��̫�W(w��ng)ģ�Kͨ�ţ�����ʾ�̺��ϱO(ji��n)������(y��ng)׃����
��Ҫ���g(sh��)����(sh��)��
1����ͨ���Դ���|����ɫ����о×2��M9 �p�^��壻
2����ͨ�� AI ���|���Gɫ����о×4��M9 �p�^��壻
3����ͨ�� AO ���|����ɫ����о×5��M9 �p�^��壻
4����ͨ�� DI/DO ���|����ɫ����о×6��M9 �p�^��塣
5��׃λ�C(j��)ģ�K���Ä������|����ɫ����о×6��M15 �p�^���
6����׃λ�C(j��)ģ�K���þ��a�����|���Gɫ����о×4��M15 �p�^���
7����Ƥ���\(y��n)ݔģ�K���þ��|����ɫ����о×5��M15 �p�^���
8�������D(zhu��n)����ģ�K���þ��|����ɫ����о×7��M15 �p�^���
9����RFID ģ�K���þ��|����ɫ����о×8��M15 �p�^���
10����CAT6 ��(bi��o)��(zh��n)�W(w��ng)������ɫ���ɫ����о×8��RJ45 ��(bi��o)��(zh��n)�B����
9���}��ģ�K
�ɹ̶��װ塢���w�}�졢��̫�W(w��ng) I/O �ɼ�ģ�K�����P����ֵȽM�ɡ��ɴ�Ŷ�N�������λ�����Йz�y��������ͨ
�^��̫�W(w��ng) I/O �ɼ�ģ�K������Ϣ��ݔ�o���I(y��)�C(j��)���ˣ�����ͨ�^ʾ�̺��M(j��n)�бO(ji��n)�ء�ģ�Kͨ�^��往�|�B�ӡ�
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���300×300×405mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���}��������6��
4)�����ݹ����N�2 �N��
5)����̫�W(w��ng) I/O �ɼ�ģ�K��
(1)����(sh��)��(j��)�ɼ�ͨ����≥8DI��
(2)��ͨӍ�f(xi��)�h��Modbus TCP��
(3)������Դ��DC24V��
10����ʽ����ģ�K
�ɾ�ʽ���ϙC(j��)�����P����ֽM�ɡ����ڃ����N���������(j��)��(sh��)Ӗ(x��n)Ҫ���əC(j��)���˿��ƹ��ϕr�C(j��)��
��Ҫ���g(sh��)����(sh��)��
1)��ģ�K���γߴ磨�L×��×�ߣ���300×300×319mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���ЙC(j��)�������L��120mm��
4)���(q��)�Ӛ���г̣�75mm��
11��Ƥ���\(y��n)ݔģ�K
��Ƥ��ݔ�͙C(j��)�����P����ֵȽM�ɡ��{(di��o)��늙C(j��)�(q��)��Ƥ��ݔ�͙C(j��)���\(y��n)ݔ��N��ͬ�������
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���600×300×180mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)��ݔ�͙C(j��)�L�ȣ�500mm��
4)����Ч�������ȣ�60mm��
5)������ٶȣ�≥4m/min��
6)������늉���DC24V��
7)���{(di��o)������
(1)��늉������� AC220V��
(2)���l�ʣ�50/60Hz��
(3)���{(di��o)�ٷ�����90-2400r/min��
12���b��ģ�K
�ɚ�ӊA�o�C(j��)��(g��u)�����P����ֵȽM�ɡ������ڲ��ֹ������Ĺ̶��������ڹ�������Ĺ̶��������ɿء�
��Ҫ���g(sh��)����(sh��)��
1)��ģ�K���γߴ磨�L×��×�ߣ���300×150×53mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���p�S����г̣�50mm��
4)��V �͉K�̶��A�ַ�����φ30mm��φ65mm��
13�������������
�������������˙C(j��)���档����������ģ�K�����o�����O(sh��)Ӌ(j��),�ɔU(ku��)չ�����И�(bi��o)��(zh��n)���I(y��)ͨ�Žӿڣ��m���ڌ�(sh��)�F(xi��n)����߉ ���ơ��W(w��ng)�j(lu��)ͨ���c���Ƒ�(y��ng)�ã��Լ�С���\(y��n)�ӿ���ϵ�y(t��ng)���^�̿���ϵ�y(t��ng)�ȸ���(y��ng)�ù��ܡ��˙C(j��)����߂����m�ԡ���ܺͶ༯�ɽӿڵ����c(di��n)�����P�ǰ����壬IP65 ���o(h��)�ȼ���
13.1����������Ҫ���g(sh��)����(sh��)��
1���������ߴ磺130×100×75mm��
2���������惦����125KB��
3�����b�d�惦����4MB��
4���������Դ惦����10KB��
5������(sh��)������14DI/10DO��
6����ģ�M����2AI/2AO��
7����λ�惦����M �^(q��)����8192 �ֹ�(ji��)��
8��������Ӌ(j��)��(sh��)����6 ·��
9�����}�_ݔ����4 ·��
10������̫�W(w��ng)�˿ڔ�(sh��)��2 ����
11����ͨ�Ņf(xi��)�h��֧�֣�PROFINET��TCP/IP��SNMP��DCP��ISO-on-TCP��UDP��Modbus��S7 ��ͨ�Ņf(xi��)�h��PROFIBUS��AS �ӿ�ͨ�ŔU(ku��)չ��֧�֣�
12������(sh��)��(j��)��ݔ�ʣ�10/100Mb/s��
13���������\(y��n)���(zh��)���ٶȣ�0.08μs/ָ�
14�����Ƅ��ֈ�(zh��)���ٶȣ�1.7μs/ָ�
15������(sh��)��(sh��)��(sh��)�W(xu��)�\(y��n)���(zh��)���ٶȣ�2.3μs ָ�
13.2���˙C(j��)������Ҫ���g(sh��)����(sh��)��
1�����@ʾ��≥10 Ӣ��� TFT �@ʾ����16777216 ɫ��
2�����ֱ��ʣ�≥800×480 ���أ�
3����������ʽ���|������
4��������o���ϕr�g��80000H��
5�����Ñ��(n��i)�棺12MB��
6����늉��~��ֵ DC24V��
7����Interfaces 1 �� PROFINET �ӿڣ�1 ���˿ڣ��������_�P(gu��n)����
8�������o(h��)�ȼ��� IP 65 (ǰ��壬����Ѱ��b)����� IP20��
14��RFID ģ�K
�� RFID �x���������P����ֵȽM�ɡ�RFID �x�����Б�(y��ng)оƬ��ͨ�^���I(y��)��������̫�W(w��ng)ͨ�ſ��ƣ���оƬ�M(j��n)����Ϣ���xȡ�͌��롣
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���300×150×59mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)��ͨӍ�ӿڣ�RS422��
4)���x������
(1)�������l��/�~��ֵ��13.56MHz��
(2)�����÷���/���ֵ��140mm��
(3)����ݔ��/�o��늂�ݔ�r/���ֵ��106kbit/s��
5������Ә�(bi��o)����
(1)����(sh��)����≥12��
(2)���Ñ�^(q��)��(n��i)�棺1024bit��
(3)���ߴ磺Φ24×3mm��
(4)�������l�ʣ�13.56MHz��
(5)���̶���ͣ������z��
(6)���Б�(y��ng)���x��2��20mm������(j��)�O(sh��)�䲻ͬ����
15�����D(zhu��n)����ģ�K
�����D(zhu��n)���ϙC(j��)�����P����ֵȽM�ɡ����D(zhu��n)���ϙC(j��)���M(j��n)늙C(j��)�(q��)�ӡ�
��Ҫ���g(sh��)����(sh��)��
1)��ģ�K���Σ�300×300×270mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���ٶȣ�≥20º/s��
4)��ؓ(f��)�d��4kg��
5)���(q��)�ӣ����M(j��n)늙C(j��)+�C���p������
6)���C���p�����p�ٱȣ�80��
7)���D(zhu��n)�Pֱ����300mm��
8)������������6��
16��׃λ�C(j��)ģ�K
��׃λ�C(j��)�����P����ֽM�ɣ�ͨ�^��Ϣ��������׃λ�C(j��)�\(y��n)�ӡ�
��Ҫ���g(sh��)����(sh��)��
1)�����γߴ磨�L×��×�ߣ���600×300×310mm��
2)���m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
3)���г̣�±45°��
4)���ٶȷ�����10��20°/s��
5)���(q��)�ӷ�ʽ�������ŷ�+݆�U�p������
6)���p�����p�ٱȣ�50��
7)�����ʣ�80W��
8)�����н^��λ�ÿ��ƹ��ܡ�
17����Pģ��Pģ�K
��Ҫ����P�̾������P����ֵȽM�ɡ����I(y��)�C(j��)���˰�Ҫ��ʰȡ�a���������P���M(j��n)�ж��c(di��n)���\(y��n)���a�⡢ƴ�D�΄�(w��)��
��Ҫ���g(sh��)����(sh��)��
1�������γߴ磨�L×��×�ߣ���300×300×40mm��
2�����m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
18�����ϕ���ģ�K
��Ҫ�ɕ����_֧�ܡ����P����ֵȽM�ɡ�ģ�K�c��ʽ����ģ�K����ʹ�ã��нӾ�ʽ����ģ�K�Ƴ��ĘӼ������r��š�
��Ҫ���g(sh��)����(sh��)��
1�������γߴ磨�L×��×�ߣ���300×150×170mm��
2�������������(sh��)����1��
3�����m���(bi��o)��(zh��n)��(sh��)Ӗ(x��n)�_��λ���b��
19��Ӌ(j��)��C(j��)��Ҫ���g(sh��)����(sh��)��
1)��CPU�������� I5��
2)���@ʾ���ߴ磺21 Ӣ�磻
3)����(n��i)�棺8GB��
4)���̑B(t��i)Ӳ�P��256G��
5)���C(j��)еӲ�P��1TB��
6)���@������(d��)�@��2G��
20���o���o����ã�60L
�cϵ�y(t��ng)���ס�
21���x�����̷���ܛ��
ܛ��������S���Ĺ��I(y��)�C(j��)����ģ�͎��Լ����I(y��)�C(j��)���ˑ�(y��ng)�÷��永�������Ը���(j��)�(xi��ng)Ŀ�����٘�(g��u)���C(j��)���ˑ�(y��ng)�ù���վ̓�M�������M(j��n)�й���վ����Ҏ(gu��)�����C(j��)���˼���߅�O(sh��)���x�͡��C(j��)���ˑ�(y��ng)�÷��桢��ˇ�����������(y��n)�C��������(y��u)�����M(j��n)�ͷ���չʾ�ȹ������ҿ������əC(j��)�����x������ָ��(d��o)�F(xi��n)�����̎��M(j��n)�ЙC(j��)���˳���ľ��̼��{(di��o)ԇ��
���g(sh��)Ҫ��
1��������ܛ��*1��
2�������M(f��i)���g(sh��)��Ӗ(x��n)��
3��������ϵ�y(t��ng)֧�ְ����ء�ABB��KUKA��F(xi��n)ANUC�������ȶ�N�C(j��)���ˣ��ṩ 250 �N���ϵĸ�Ʒ�ƙC(j��)����ģ�͡�
4���������x�����̹��ܣ��܉�ֱ�����ɰ����ء�ABB��KUKA��F(xi��n)ANUC�������� 30 �NƷ�ƙC(j��)���˵Ĵ��a��
5����֧���P(gu��n)��(ji��)�͙C(j��)���ˡ�Delta��SCARA��ֱ������(bi��o)�Ȳ�ͬ��(g��u)�͙C(j��)���ˡ�֧�ֶ�N��ʽ�����S CAD ģ�ͣ��Ɍ�(d��o)��U(ku��)չ���� step��igs��stl �ȸ�ʽ���п��Ը���(j��)�C(j��)���� D-H ����(sh��)����(chu��ng)�� 6 �S��7 �S��(li��n)�C(j��)����ģ�͵Ĺ��ܡ����ṩ�C(j��)е����y�L�c CAD �ɈD���g(sh��)�(xi��ng)Ŀ��(sh��)�`�W(xu��)��(x��)ƽ�_��
6����֧�ֹ���У��(zh��n)���ܣ��܉����(j��)�挍(sh��)��r�c��Փģ�͵ą���(sh��)�`���Ԅ��{(di��o)��܉�E����(sh��)��
7����܉�E���ɿɻ��� CAD ��(sh��)��(j��)������܉�E�����^�̣���߾��ȣ������Ì�(sh��)�wģ�͡����������ֱ�������\(y��n)��܉�E��
8���������S����܉�E�{(di��o)����(y��u)�����߰�������ײ�z�顢���I(y��)�C(j��)���˿��_(d��)�ԡ��ˑB(t��i)�殐�c(di��n)���S���ޡ���(ji��)�Ĺ��㡢܉�E�Ԅ��{(di��o)����(y��u)���ȹ��ܡ�
9���������S���Ĺ�ˇ��(y��ng)�ù��߰�����횰����������ڴ�ĥ����Ϳ����������ӵȡ����������O(sh��)Ӌ(j��)���x����������(bi��o)��Ϣ����(sh��)�H�����cģ����������(bi��o)У��(zh��n)�_��܉�E���ȣ��a�ˇ��ģ�M�挍(sh��)����ץȡ�[���^�̣�֧�� APT Source�� NC ��ʽ G ���a�Č�(d��o)�벢�Ԅ��D(zhu��n)���鹤�I(y��)�C(j��)�����\(y��n)��܉�E�ȹ��ܡ�
10�����ṩ���I(y��)�C(j��)����̓�M�̌W(xu��)ģ�K����̓�Mʾ�������C(j��)���˲����b�䡢�Ԅ����ɷ����\(y��n)��ҕ�l���������ɻ��� html���ŵ�ҕ�l�ͻ��� pdf �� 3 �S�ɲ����ļ���
11�����ṩ��(qi��ng)��� Python API ����֧�֣����������x������ܛ�����x�����̹��ܣ������S�_չ�����C(j��)���˙C(j��)��(g��u)���Ԅӻ���(y��ng)�á����M(j��n)�з���͑�(y��ng)���ڳ���C(j��)����ȡ�����w�͑�(y��ng)���ڏ�(f��)�s�Ķ��C(j��)����ͬ���\(y��n)�ӵȡ�
12����֧�֙C(j��)���˾��Ș�(bi��o)�����ܣ�����֧�ּ����ۙ�x��(bi��o)�������w���C(j��)��(bi��o)����
13����֧�ֶ��C(j��)����ͬ���\(y��n)�ӷ��棬�����܉�?q��)��F(xi��n) 3 ���C(j��)���˵�ͬ���\(y��n)�ӡ�
14�������ЙC(j��)�����ⲿ�S�\(y��n)�ӣ��܉�?q��)��F(xi��n) 7��8 �S���x�����̹��ܡ�
15���������������S�Ԅӻ����a(ch��n)�����湦�ܣ��ɰ����a��C(j��)��3 �N������͙C(j��)���ˡ���ˮ���ȡ�
16�����cͬƷ�ƹ��I(y��)�C(j��)���˷���ܛ�������� RobotStudio��RobotMaster���ڑ�(y��ng)���I(l��ng)��֧��ƽ�_��֧�֙C(j��)����Ʒ�ơ�ʾ�̾��̡��x�����̡��C(j��)�����x��������ײ�z�y���C(j��)����ͨӍ�����C(j��)���˅f(xi��)�{(di��o)���桢�C(j��)�����\(y��n)�ӌW(xu��)��ģ��܉�EҎ(gu��)���������_�l(f��)���C(j��)���˅���(sh��)��(bi��o)���ȷ����M(j��n)���б팦�ȃ�(y��u)�ݡ�
17�������� ABB��KUKA��FANUC�������C(j��)����Ʒ�Ƶ�̓�Mʾ����ʾ�̹��ܣ��܉�ͨ�^̓�Mʾ������(sh��)�F(xi��n)���C(j��)���˵��քӲ����Լ�������a�ľ����\(y��n)�С�
��1�����քӲ����а����C(j��)���˵��P(gu��n)��(ji��)����(bi��o)ϵ����������(bi��o)ϵ���Լ���������(bi��o)ϵ�µ��քӿ����\(y��n)�ӣ�
��2�����C(j��)���˔�(sh��)��(j��)̓�Mʾ�����ϵČ�(sh��)�r�@ʾ��
��3����̓�Mʾ�������܉���ȫ�����挍(sh��)ʾ����������ʽ�M(j��n)�г���IJ��롢�������Լ������ļ��ı���ʹ��_��
��4����̓�Mʾ����������٬F(xi��n)��(zh��)�У��(q��)�әC(j��)���˰��ճ����\(y��n)�ӡ�
18�������ɟo�����P(gu��n)��(ji��)��ʾ�̹��ܡ�
��1�������� 485 ͨӍ�� TCP/IP ͨӍ�ɷN�ӿ���ʽ���܉�ɼ��o�����P(gu��n)��(ji��)��ʾ��܉�E��
��2�����܉����ɰ����ء�ABB��KUKA��F(xi��n)ANUC��������ʷ�ձȠ���UR���R���ȶ�NƷ�ƙC(j��)���˵Ĵ��a�Ĺ��ܡ�
19����֧�ֻ��� Python��C#�ȸ��Z�Ե� API �ĔU(ku��)չ���̡�
20���� �A(y��)�������_�l(f��)�ӿڣ��C(j��)����ģ�ͺ͈��������Ñ��Լ����ӣ����{(di��o)�ô˴β�ُ�ęC(j��)���˿������ĵ��\(y��n)�ӿ��ƺ���(sh��)�죬���\(y��n)�ӡ�߉����ˇ�ȣ�
���I(y��)�C(j��)���ˑ�(y��ng)�þ��� 1+X �̌W(xu��)�YԴ��
1�����I(y��)�C(j��)���ˑ�(y��ng)�þ��� 1+X �I(y��)���ܵȼ��C���̎���Ӗ(x��n)�v�x�������C(j��)���˅���(sh��)�����(xi��ng)Ŀ���C(j��)�����O(sh��)������(xi��ng)Ŀ���C(j��)����ʾ�̾����(xi��ng)Ŀ���C(j��)���˲��������(xi��ng)Ŀ���C(j��)�����x�������(xi��ng)Ŀ���C(j��)���˷����_�l(f��)�_�l(f��)�(xi��ng)Ŀ��Ҫ������O(sh��)��ʹ���f���������Ϲ��I(y��)�C(j��)���ˑ�(y��ng)�þ��� 1+X �I(y��)���ܵȼ��C������Ҫ����΄�(w��)�������I(y��)�C(j��)���ˑ�(y��ng)�þ����(xi��ng)Ŀ��Ӗ(x��n)ҕ�l��늚�ԭ��D��plc �����|�������C(j��)���˳���
2�����I(y��)�C(j��)���ˑ�(y��ng)�þ����I(y��)���ܳ����n��
�n��Ŀ��(bi��o)����Ϥ���I(y��)�C(j��)����ϵ�y(t��ng)������(g��u)�ɣ��xȡ�o������(bi��o)ϵ���쾚ʹ�ù��I(y��)�C(j��)���˻���ָ����I(y��)�C(j��)�����M(j��n)�о��̣���ϵ�y(t��ng)�M(j��n)�л����S�o(h��)���n�̃�(n��i)�ݣ���(sh��)Ӗ(x��n)�(xi��ng)Ŀ��PPT1��ҕ�l ��ԇ�} �����̎��փԡ��W(xu��)���փԡ��̲ġ��ھ��n�̡�����Դ�ļ���PLC Դ���̌W(xu��)�����