

�������ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)��ָͨ�^(gu��)�F(xi��n)����Ϣ���g(sh��)�ֶΣ��Y(ji��)�Ϲ��I(y��)�C(j��)���˵Č�(sh��)�H�����͑�(y��ng)�ã���W(xu��)���ṩһ��(g��)ģ�M��(sh��)�H���a(ch��n)�h(hu��n)���Č�(sh��)�`�̌W(xu��)��(ch��ng)�����������������c(di��n)��
����1. �߶ȷ��棺��(sh��)Ӗ(x��n)ƽ�_(t��i)�܉�ģ�M��(sh��)�H���I(y��)���a(ch��n)�h(hu��n)�����W(xu��)����̓�M�h(hu��n)�����M(j��n)�Ќ�(sh��)�H��������ߌ�(sh��)�`������
����2. ��(g��)�Ի����ƣ���(sh��)Ӗ(x��n)ƽ�_(t��i)���Ը���(j��)��I(y��)������I(y��)���ƌ��ٵ���Ӗ(x��n)�����������Ӗ(x��n)Ч����
����3. ��ȫ�Ըߣ���(sh��)Ӗ(x��n)ƽ�_(t��i)�������M(j��n)�İ�ȫ��ʩ���_���W(xu��)���ڌ�(sh��)�`�����^(gu��)���еİ�ȫ��
����4. �_(k��i)���ԣ���(sh��)Ӗ(x��n)ƽ�_(t��i)�����c���������YԴ����Ϣϵ�y(t��ng)�M(j��n)�Пo(w��)�p��(du��)�ӣ���(sh��)�F(xi��n)�YԴ��������Ϣ��ͨ��
�����������ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)������I(y��)�đ�(y��ng)�Ãr(ji��)ֵ
����1. ����˲����B(y��ng)�|(zh��)�������ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)�܉�����W(xu��)���������չ��I(y��)�C(j��)���˵IJ������ܣ�����˲����B(y��ng)�|(zh��)����
����2. ���M(j��n)�a(ch��n)�W(xu��)�нY(ji��)�ϣ���(sh��)Ӗ(x��n)ƽ�_(t��i)���Ԟ���I(y��)�ṩ���g(sh��)֧�֣�������I(y��)��Q��(sh��)�H���a(ch��n)�еĆ�(w��n)�}�����M(j��n)�a(ch��n)�W(xu��)�нY(ji��)�ϡ�
����3. ������I(y��)��(j��ng)��(zh��ng)����ͨ�^(gu��)��(sh��)Ӗ(x��n)ƽ�_(t��i)���B(y��ng)���˲ž߂��^��(qi��ng)�Č�(sh��)�`�����̈́�(chu��ng)��������������������I(y��)�����w��(j��ng)��(zh��ng)����
����4. ���M(j��n)�a(ch��n)�I(y��)����(j��)�����ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)���ƏV��(y��ng)�ã��������Ƅ�(d��ng)���y(t��ng)����I(y��)�����������D(zhu��n)�ͣ���(sh��)�F(xi��n)�a(ch��n)�I(y��)����(j��)��
�����������ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)�İl(f��)չ�F(xi��n)���cǰ��չ��
����Ŀǰ����(gu��)��(n��i)���ѽ�(j��ng)ӿ�F(xi��n)��һ����(y��u)������ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)�����(gu��)��“OPC UA for Factory Automation”�ȡ��@Щƽ�_(t��i)���Ƅ�(d��ng)����I(y��)�D(zhu��n)������(j��)������˲����B(y��ng)�|(zh��)���ȷ���l(f��)�]�˷e�O���á��S���҇�(gu��)����I(y��)�Ŀ��ٰl(f��)չ�����ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)����(hu��)�õ�Խ��(l��i)Խ�V���đ�(y��ng)�úͰl(f��)չ��
�������Y(ji��)�����ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)������һ������I(y��)�˲����B(y��ng)����Ҫ�d�w��������Ҫ�đ�(zh��n)�����x����δ��(l��i)�İl(f��)չ�^(gu��)���У��҂���(y��ng)ԓ�Ӵ�(du��)��(sh��)Ӗ(x��n)ƽ�_(t��i)���аl(f��)Ͷ�룬��������ƽ�_(t��i)���ܣ���߽̌W(xu��)�|(zh��)�������҇�(gu��)����I(y��)�İl(f��)չؕ�I(xi��n)������
1��ݔ���Դ��?ji��n)���������220V±10% 50Hz
2�������h(hu��n)�����ض�-10�桫+40�� ����(du��)���≤85%��25�棩 ���Σ�4000m
3���b����������1.5kVA
4����(sh��)Ӗ(x��n)ƽ�_(t��i)�ߴ磺2300mm×1200mm×800mm�����������Ã�(y��u)�|(zh��)�X�Ͻ�Ͳ��P䓙C(j��)�ӹ����ͣ����ȸߣ����^�o(w��)���۵ȡ�
5�����ƹ�ߴ磨�C(j��)���ˣ���540mm×410mm×800mm
6����ȫ���o(h��)������©늱��o(h��)����ȫ���χ�(gu��)�Ҙ�(bi��o)��(zh��n)
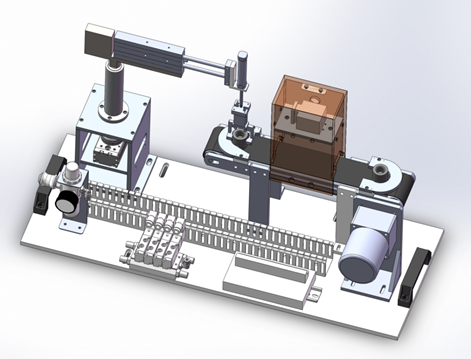
�����O(sh��)��Y(ji��)��(g��u)�c�M��
���ܹ��I(y��)�C(j��)���ˌ�(sh��)Ӗ(x��n)ƽ�_(t��i)����ABB�����ɶȹ��I(y��)�C(j��)����ϵ�y(t��ng)������ϵ�y(t��ng)���ɾ��̿�������PLC��ϵ�y(t��ng)��ҕ�X(ju��)�z�(y��n)ϵ�y(t��ng)���֒�ϵ�y(t��ng)�����φ�Ԫ���ӹ�ϵ�y(t��ng)���b��ϵ�y(t��ng)���}(c��ng)��(k��)��Ԫ���������늚���ƹ��ͲČ�(sh��)Ӗ(x��n)�����Ͳ���X���ȽM�ɡ�
1�����S�C(j��)���ˣ�ABB��
6�S���ƙC(j��)е�֣�����������25kg����ߺ���3kg�����������_(d��)580mm����ͨ�^(gu��)���ԣ��DŽ��ԣ��Ԅ�(d��ng)����Q������(zh��)��һϵ�����I(y��)���؏�(f��)��λ���ȣ�0.01 mm���S1���D(zhu��n)����������+165°�� -165°���S2�ֱ�+110°�� -110°���S3�ֱ�+70°�� -90°���S4����+160°�� -160°���S5����+120°�� -120°���S6���D(zhu��n)+400°�� -400°���C(j��)���˸߶ȣ�700 mm���C(j��)���˵����ߴ磺180×180 mm���ɾ͙C(j��)����ʹ�É�����(n��i)��ʹ�ÙC(j��)�����x��ܛ���M(j��n)�Ќ�(sh��)�r(sh��)����IO���C(j��)����3D��(d��ng)�B(t��i)��(d��ng)���O(ji��n)�ء��h(yu��n)�̙C(j��)����ϵ�y(t��ng)����c�֏�(f��)���ܣ��Ԅ�(d��ng)���������c�d�əz�y(c��)�O(sh��)�����ܣ���ʾ������(sh��)�F(xi��n)�˙C(j��)����(d��ng)������_(k��i)�l(f��)�����ṩ����VB��C#�Ķ����_(k��i)�l(f��)���ܣ��C(j��)����ȫ�������B(y��ng)�Ԅ�(d��ng)�S�o(h��)�z�y(c��)ϵ�y(t��ng)���ܣ��C(j��)�����\(y��n)��(d��ng)܉�E��(sh��)�r(sh��)�{(di��o)���ܣ��Ԏ�IO�Զ��x�ɾ��̰��o��3D��(sh��)�r(sh��)���m�u�U�ք�(d��ng)����ϵ�y(t��ng)��늳�����h(hu��n)����(ji��)ʡ���ܣ��K��C(j��)����ϵ�y(t��ng)��������(j��)����(j��)�Ñ�����֧��RAPID�����Z(y��)��Ҏ(gu��)������ֱ�ӽ�ገ�(zh��)�У�֧��ROBOTAPPS���_(k��i)�l(f��)���C(j��)���˿���ϵ�y(t��ng)ܛ����횻���WINCEƽ�_(t��i)���C(j��)���˿���ϵ�y(t��ng)ԭ��̑B(t��i)�惦(ch��)���������õ���1G����֧��USB�U(ku��)չ�鸱�惦(ch��)�����C(j��)���˿���ϵ�y(t��ng)���֧���\(y��n)��ROBOTWARE6.0���ϵİ汾��
IRC5�C(j��)е�ֿ��ƹߴ�258*450*580mm������220V��늣�����ܛ��RAPID,�o���ͣ����o(h��)�ȼ�(j��)IP20
�C(j��)����ʾ����������1KG����ɫ�D�ν����|�����������U�;o��ֹͣ���o�������ֲ���֧�֣�USB��(ch��)����֧�֡�
���ף�RW�C(j��)���˲���ϵ�y(t��ng)���C(j��)�����c������|7�ף�ʾ�����c�C(j��)������|10�ף��C(j��)���˲���ϵ�y(t��ng)����ײ�z�y(c��)ܛ��������ͨ��ģ�K��16�M(j��n)16����(sh��)��ݔ��ݔ���塣

(�����D)
���ɾ��̿���������(sh��)�����U(ku��)չģ�K����̫�W(w��ng)ͨ��ģ�K�ȣ������x��(xi��)RFIDϵ�y(t��ng)�Ĺ�����(sh��)��(j��)�����ƙC(j��)���ˡ�늙C(j��)����Ȉ�(zh��)�ЙC(j��)��(g��u)��(d��ng)����̎������Ԫ�z�y(c��)��̖(h��o)����(sh��)��(j��)��ݔ?sh��)��΄?w��)��
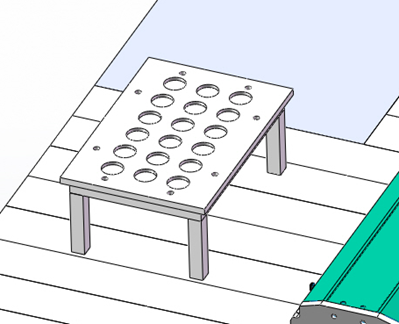
ģ�K�ߴ�400*400mm���ɹ�늂����������ϸן��M�ɣ����г��Ϲ�λ�ṩ���ϣ�ʹ�Ì�(sh��)�(y��n)�����^�p�ԡ�
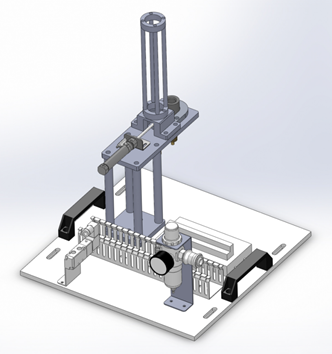
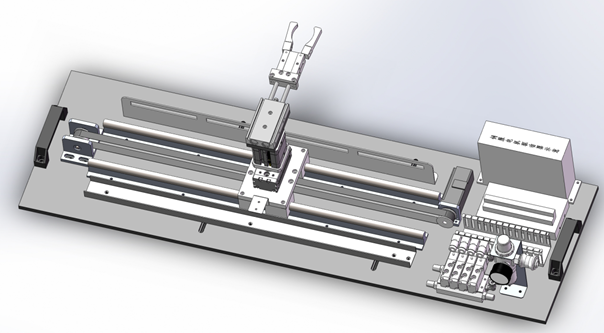
ģ�K�ߴ�1100*770mm����ֱ����(zh��)���������\(y��n)�C(j��)е�ֽM�ɣ��ɶ�N��M�ɵęC(j��)е��ؓ(f��)؟(z��)������ץȡ���[�š�ֱ����(zh��)�������ŷ�늙C(j��)��ͬ�����M�ɣ�ؓ(f��)؟(z��)����(d��ng)�C(j��)е�־��_�Ƅ�(d��ng)���Ķ���(sh��)�F(xi��n)�������ڸ���Ԫ֮�g�ľ��_���\(y��n)�����\(y��n)��(d��ng)�c�����ڶ���(g��)����
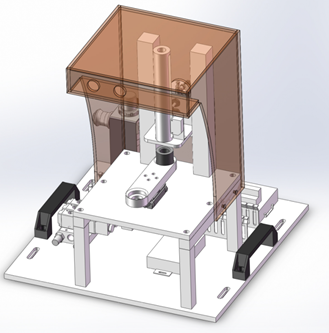
ģ�K�ߴ�400*400mm�������D(zhu��n)�ס��ӹ����u׃�ʟ��ȽM�ɣ�ϵ�y(t��ng)�����мӹ�ϵ�y(t��ng)����������ˇ�Ę�(bi��o)��(zh��n)���̡��ӹ��r(sh��)����мӹ���ʾ��
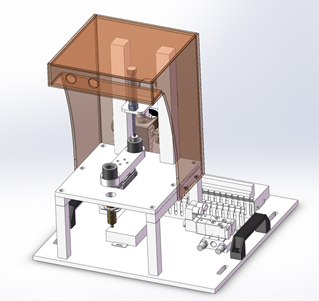
ģ�K�ߴ�400*400mm�������D(zhu��n)�ס��ӹ����u׃�ʟ��ȽM�ɣ���Ҫ�������b���^(gu��)�̣����cԭ���ϽY(ji��)�ϡ��b��r(sh��)������b����ʾ��
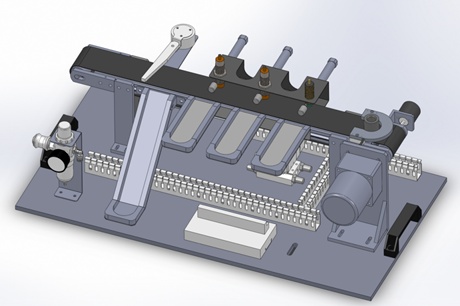
ģ�K�ߴ�780*300mm�������͎���ҕ�X(ju��)���C(j��)�����w��������4�S�C(j��)е�ֵȣ����R(sh��)�e���ϵ��ɫ���ֱ�a(ch��n)Ʒ�Ƿ�ϸ����������ϵ��֒���Ԫ��
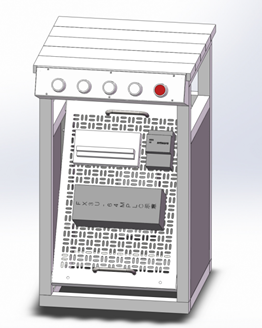
ģ�K�ߴ�770*400mm����Ҫ���X�Ͻ��ͲĻ��w�����ϸס���늂��������ɫ���������ӽ��_(k��i)�P(gu��n)�����w�������ȽM�ɡ����Æ���늙C(j��)����\(y��n)ݔ���ܣ�ͨ�^(gu��)���������\(y��n)ݔ��ͨ�^(gu��)PLC���\(y��n)�㌦(du��)�����M(j��n)�з֒���������Ɍ�(du��)ë�������|(zh��)���ɫ���߶ȵęz�y(c��)�������ϸ��z����
ģ�K�ߴ�320*220mm�����֒��õIJ�����ɴa��惦(ch��)�Ĺ��ܡ�
���ڰ��b�C(j��)���˿�������PLC��׃�l�����{(di��o)�ٿ�������늚ⲿ�������þW(w��ng)�װ�ĽY(ji��)��(g��u)�������������b��늚Ⲽ�֣��������O(sh��)��Č�(sh��)Ӗ(x��n)���ܡ�ͨ�^(gu��)������|���c�ͲČ�(sh��)Ӗ(x��n)�����B����(qi��ng)��늷��x���B�Ӱ�ȫ�ɿ���
11��ҕ�X(ju��)�R(sh��)�eϵ�y(t��ng)
ҕ�X(ju��)�R(sh��)�e�C(j��)��(g��u)���R(sh��)�e�z���^��Ҫ���`����1.8V/lux-sec@550nm���ֱ���2048×1536�����V푑�(y��ng)400nm��1000nm������15fps @ 1600 x 1200/30 fps @ 800 x 600������ɫ�������ڹ��֡�LED�a(b��)���Դ�ȽM�ɣ�����ҕ�X(ju��)�R(sh��)�eܛ������(du��)�����M(j��n)�Йz�(y��n)�Ƿ�ϸ�
12���F(xi��n)��PLC늚����M(j��n)������ƽ�_(t��i)
��ƽ�_(t��i)����(li��n)�W(w��ng)���g(sh��)�\(y��n)���ڌ�PLC��Ϣ������(sh��)��(j��)�ς�����ƽ�_(t��i)���M(j��n)�к�����(sh��)��(j��)�惦(ch��)�����ṩ�S���Ĕ�(sh��)��(j��)�������߷�����Ӝ�(zh��n)�_�����Ք�(sh��)��(j��)�c������(sh��)��(j��)����F(xi��n)��(ch��ng)��ʾ����ƽ�_(t��i)�Ɍ�(sh��)�F(xi��n)���ׂ�(g��)���ܣ� ��(sh��)��(j��)��ϵ�y(t��ng)�ς����֙C(j��)app��(sh��)��(j��)��ԃ���vʷ��(sh��)��(j��)��ԃ����(sh��)��(j��)�����y(t��ng)Ӌ(j��)���ŷ�����ơ�
�C(j��)���˿���ԭ��ϵ�y(t��ng)ƽ�_(t��i)��
(1)����DS28335������оƬ�O(sh��)Ӌ(j��)��3.5KW���I(y��)��(j��)�(q��)��(d��ng)ģ�K�������Ƅ�(d��ng)����λ�Â��������ŷ�늙C(j��)�������D(zhu��n)�ٿ��ƣ�λ�ÿ��ƣ�����LABVIEW���Z(y��)��������λ�C(j��)����ϵ�y(t��ng)������7���ɫ�|�����@ʾ��֧�ָ�(j��)�Z(y��)��MATLAB�_(k��i)�l(f��)ƽ�_(t��i)���Ñ��o(w��)��C�Z(y��)�Լ�Ӳ��֪�R(sh��)���Ɍ�ע�㷨�о���
(2)��A/D��D/Aͨ������DSP����������A/Dͨ���⣬߀���~��U(ku��)չ4·����12λ��D/A�D(zhu��n)�Qͨ�����ɾ����������Ⲩ�Σ�ݔ��늉���������±10V��3)����U(ku��)I/O����DSP������I/O���⣬��U(ku��)չ��·������xݔ���ڣ�6·���ϣ�����·������xݔ��ڣ�6·���ϣ�
(3)���˙C(j��)���棺����7�����ϲ�ɫ�|�������@ʾ늙C(j��)��(sh��)�r(sh��)�D(zhu��n)�١��l�ʣ���(d��ng)ǰ�����ڡ��r(sh��)�g�ȡ��ṩ�˙C(j��)���Q���漰��λ�C(j��)ܛ������(sh��)�F(xi��n)����(d��ng)��ֹͣ���l���{(di��o)��(ji��)���o���D(zhu��n)���{(di��o)��(ji��)��PID�{(di��o)��(ji��)�ȿ��ƣ�ͬ�r(sh��)��λ�C(j��)�Ɍ�(sh��)�r(sh��)�^�y(c��)������ٶȷ����ȡ�
(4)����λ�C(j��)ܛ����ͨ�^(gu��)��λ�C(j��)���Ԍ�(sh��)�F(xi��n)����(d��ng)��ֹͣ���l���{(di��o)��(ji��)���o���D(zhu��n)���{(di��o)��(ji��)��PID����(sh��)�O(sh��)���ȹ��ܣ�ͬ�r(sh��)�Ɍ�(sh��)�r(sh��)�^�y(c��)������ٶȷ����Ȳ��Ρ�
(5)��ͨ�Žӿڣ�1��(g��)CAN�ӿڣ�1��(g��)USB�ӿڣ�1��(g��)10M/100M��̫�W(w��ng)�ӿڣ������Ñ��U(ku��)չ��
(6)������ģ�K������IPMģ�K�����ݔ������3.5kW��
(7)�����o(h��)���ܣ������^(gu��)�����^(gu��)���c�^(gu��)�ᱣ�o(h��)���ܣ���(d��ng)���o(h��)�l(f��)���r(sh��)���̷��iPWM�}�_ݔ����
(8)�����ṩԴ���a���W(xu��)����(sh��)�(y��n)�r(sh��)�M(j��n)�г������{(di��o)ԇ�����ṩ���P(gu��n)�Č�(sh��)�(y��n)ָ��(d��o)��(sh��)���_(k��i)�Ų���PWM�ӿڣ�6·���ϣ���I/O�ڡ�CAP�ڡ�AD��DA �ȵ�����·�ӿڣ�����ͬ��(sh��)�(y��n)�U(ku��)չʹ�ã���DSP�呪(y��ng)ԓ���_(k��i)�ſɶ����_(k��i)�l(f��)�塣����DSP����������ͬ�Ŀ����㷨���d��DSPоƬ�У����N��(bi��o)��(zh��n)�ӿڣ�SCI��JTAG�ȣ����@ʾģ�K�����@�}�_�a(ch��n)����Ԫ����a��̖(h��o)̎���Ԫ���Դ��늙C(j��)���Ɔ�Ԫ��늙C(j��)�(q��)��(d��ng)оƬ�Եȣ�֧�ֶ�N늙C(j��)���ƣ�֧��24Vϵ�y(t��ng)�߉�ϵ�y(t��ng)��
14.3D����ϵ�y(t��ng)����ϵ�y(t��ng)�������S�O(sh��)Ӌ(j��)������ȸߣ��c�O(sh��)��1��1���ף�ȫ������b���Ӿ��������\(y��n)�з���ȣ��ṩ��Ƭ����(sh��)�(y��n)�������O(sh��)���(li��n)�{(di��o)������ʾ���������P(gu��n)��ԭ��D��
������(sh��)�(y��n)������ɵČ�(sh��)�(y��n)�(xi��ng)Ŀ
�(xi��ng)Ŀһ PLC�����c�{(di��o)ԇ
�(xi��ng)Ŀ�� ���I(y��)�C(j��)����ʾ�̆�Ԫʹ��
�(xi��ng)Ŀ�� ���I(y��)�C(j��)����ܛ��ʹ��
�(xi��ng)Ŀ�� ���I(y��)�C(j��)���˻���ָ�����
�(xi��ng)Ŀ�� ���I(y��)�C(j��)���˹����ĸ�ۙץȡ
�(xi��ng)Ŀ�� ���I(y��)�C(j��)���˵Ą�(d��ng)�����̑�(y��ng)��
�(xi��ng)Ŀ�ߡ����Ϸ֒��ľ��̑�(y��ng)��
�(xi��ng)Ŀ�ˡ�����(g��)ϵ�y(t��ng)�ľ����c��(y��ng)��
�(xi��ng)Ŀ�š��C(j��)��ҕ�X(ju��)�R(sh��)�eϵ�y(t��ng)
�(xi��ng)Ŀʮ���C(j��)���˿���ϵ�y(t��ng)ԭ�����_(k��i)�l(f��)